
Error in Building a Visual Robot Model with URDF from Scratch

-In the tutorial http://wiki.ros.org/urdf/Tutorials/Bu...
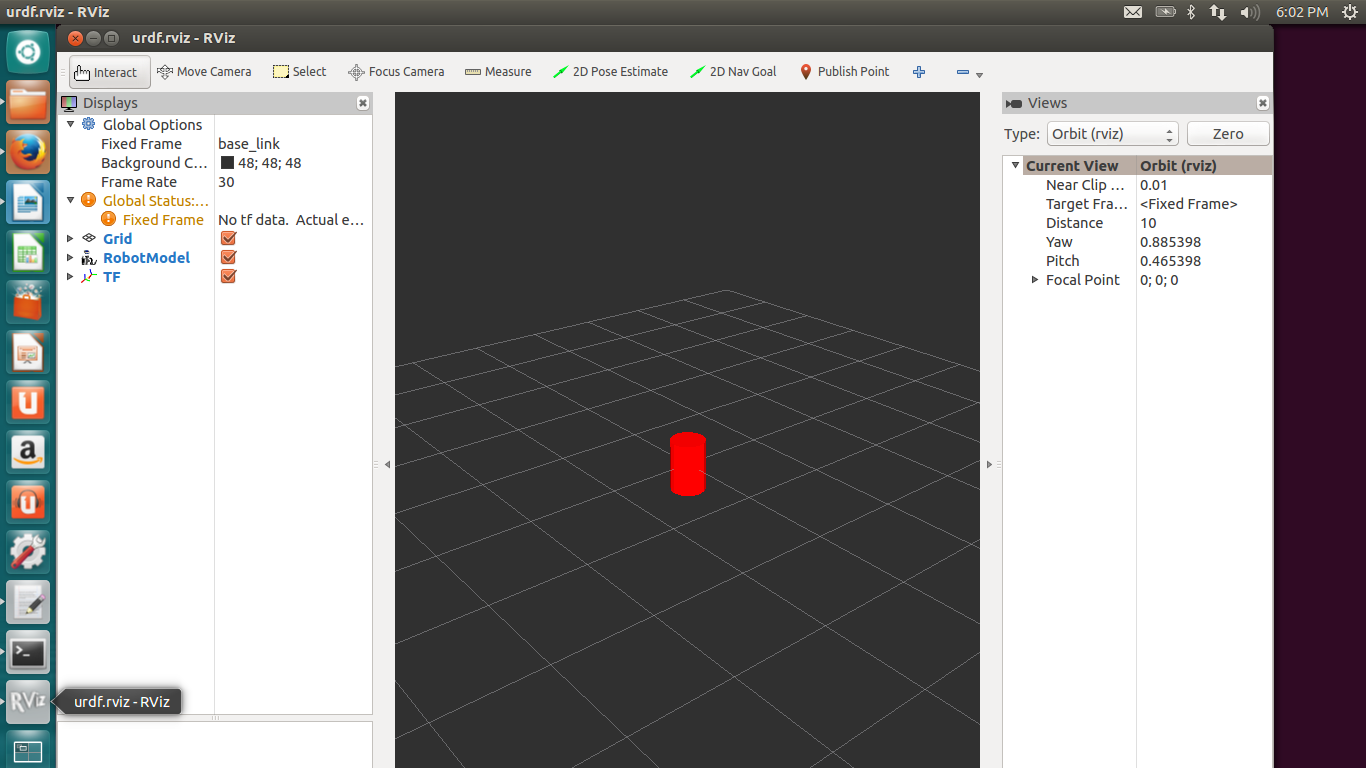
when I typed the following command roslaunch urdf_tutorial display.launch model:=urdf/01-myfirst.urdf in the terminal to examine the model, I had the following error
... logging to /home/eman/.ros/log/c7aa09c8-aee6-11e3-82a3-f46d04518b4d/roslaunch-eman-K52F-6478.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Traceback (most recent call last):
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/__init__.py", line 279, in main
p.start()
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/parent.py", line 257, in start
self._start_infrastructure()
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/parent.py", line 206, in _start_infrastructure
self._load_config()
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/parent.py", line 121, in _load_config
self.config = roslaunch.config.load_config_default(self.roslaunch_files, self.port, verbose=self.verbose)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/config.py", line 428, in load_config_default
loader.load(f, config, verbose=verbose)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/xmlloader.py", line 698, in load
self._load_launch(launch, ros_config, is_core=core, filename=filename, argv=argv, verbose=verbose)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/xmlloader.py", line 670, in _load_launch
self._recurse_load(ros_config, launch.childNodes, self.root_context, None, is_core, verbose)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/xmlloader.py", line 614, in _recurse_load
self._param_tag(tag, context, ros_config, verbose=verbose)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/xmlloader.py", line 95, in call
return f(*args, **kwds)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/xmlloader.py", line 240, in _param_tag
value = self.param_value(verbose, name, ptype, *vals)
File "/opt/ros/hydro/lib/python2.7/dist-packages/roslaunch/loader.py", line 453, in param_value
with open(textfile, 'r') as f:
IOError: [Errno 2] No such file or directory: u'urdf/01-myfirst.urdf'
even though,the urdf_tutorial package are found in the following path filesystem/opt/ros/hydro/share and contains the urdf file.
when I tried the command rospack find urdf_tutorial,it returned the package path /opt/ros/hydro/share/urdf_tutorial.
so,it means that ROS can see the package.
So,my question is; What is the cause of this error?? & why does it return "no such file or directory" ??
- my distribution is hydro.
- I use Ubuntu 12.10.
please,help. Thanks in advance.

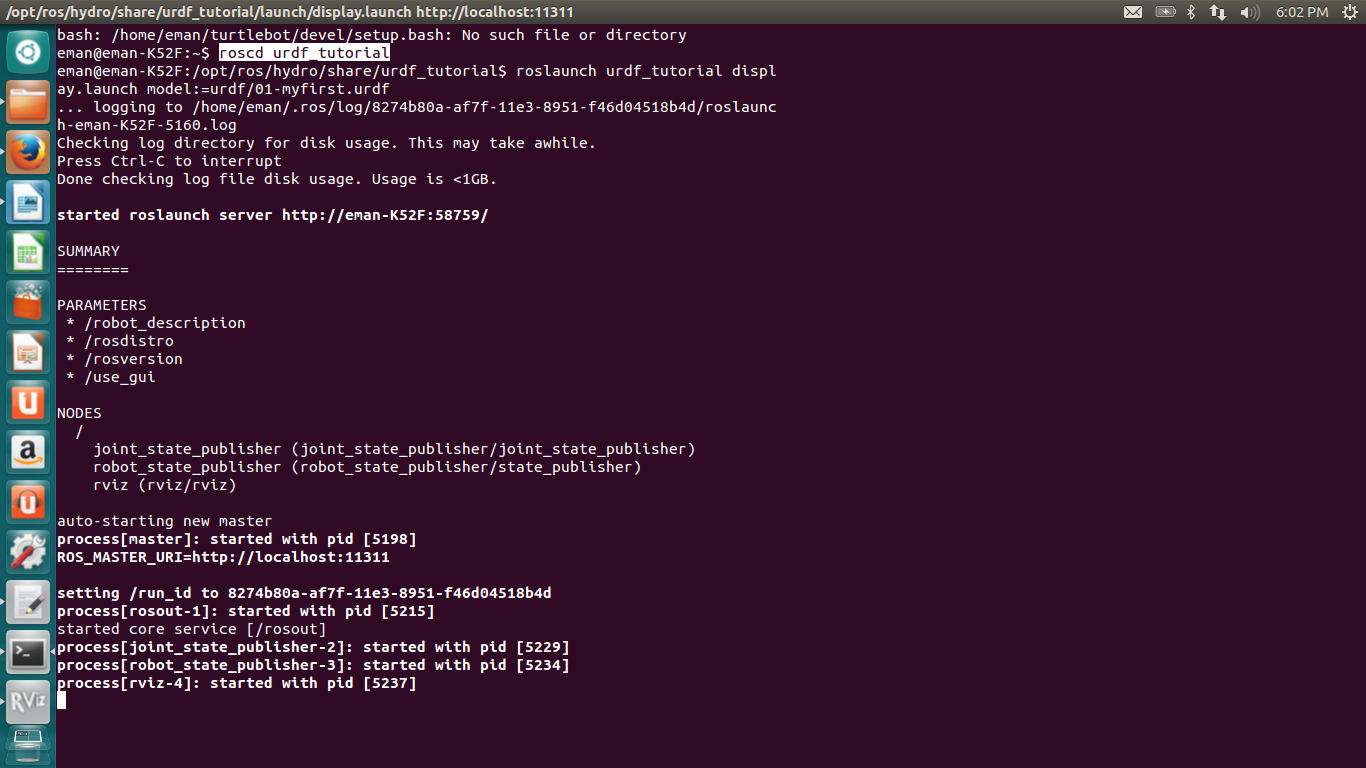

Did you run roslaunch from within the urdf_tutorial package? Did you run roscd urdf_tutorial before roslaunch?