
Adding trajectory to hector_geotiff output

I have a Hokuyo URG-04LX and I use Hector_Slam for mapping. I use hector_geotiff for saving the map as a .tiff file but it doesn't contain trajectory. Is there any way for add trajectory to .tiff file? Or is there another package for having these options?
this is my launch file after adding the line that @Stefan Kohlbrecher said :
<launch>
<arg name="trajectory_source_frame_name" default="/map"/>
<arg name="trajectory_update_rate" default="4"/>
<arg name="trajectory_publish_rate" default="0.25"/>
<arg name="map_file_path" default="$(find hector_geotiff)/maps"/>
<arg name="map_file_base_name" default="hector_slam_map"/>
<node pkg="hector_trajectory_server" type="hector_trajectory_server" name="hector_trajectory_server" output="screen">
<param name="target_frame_name" type="string" value="/map" />
<param name="source_frame_name" type="string" value="$(arg trajectory_source_frame_name)" />
<param name="trajectory_update_rate" type="double" value="$(arg trajectory_update_rate)" />
<param name="trajectory_publish_rate" type="double" value="$(arg trajectory_publish_rate)" />
</node>
<node pkg="hector_geotiff" type="geotiff_node" name="hector_geotiff_node" output="screen" launch-prefix="nice -n 15">
<remap from="map" to="/dynamic_map" />
<param name="map_file_path" type="string" value="$(arg map_file_path)" />
<param name="map_file_base_name" type="string" value="$(arg map_file_base_name)" />
<param name="geotiff_save_period" type="double" value="1" />
<param name="draw_background_checkerboard" type="bool" value="true" />
<param name="draw_free_space_grid" type="bool" value="true" />
<param name="plugins" type="string" value="hector_geotiff_plugins/TrajectoryMapWriter" />
</node>
</launch>
This is my output after running this launch file :
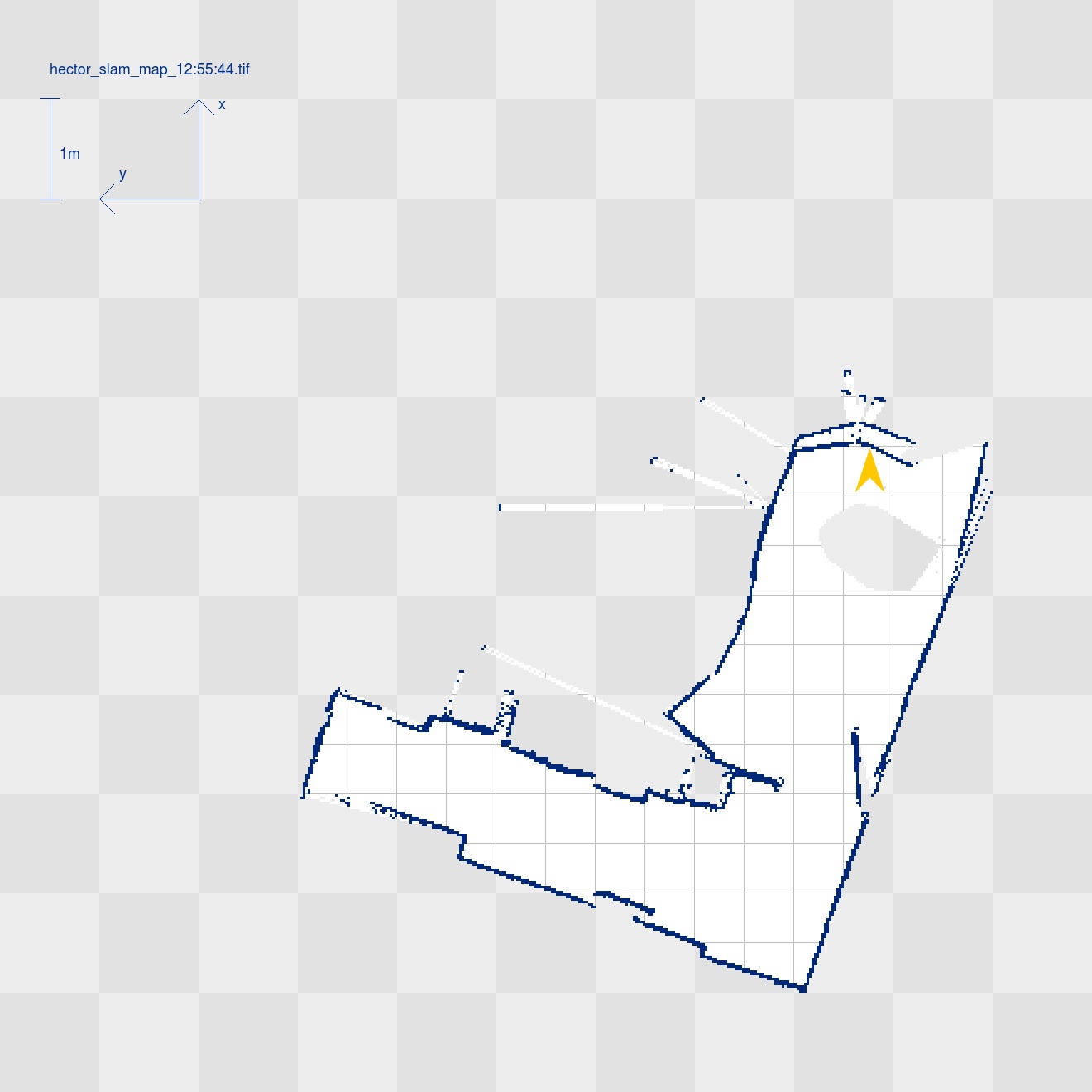
the yellow arrow drew at start point and didn't move!
add a comment

