
Arm navigation: Trajectory not checked?

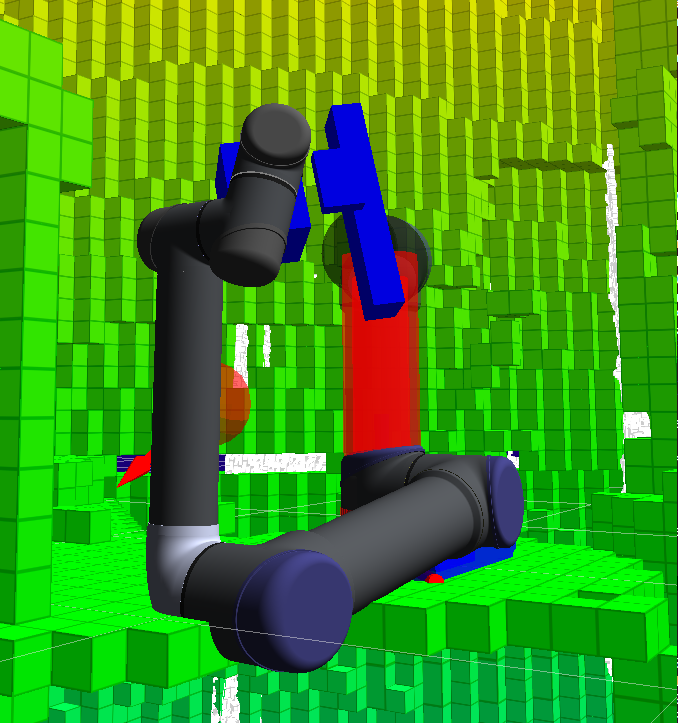
I use the old arm navigation in combination with OctoMap. Collision checking goes well for target locations but sometimes the robot arm still collides. It is moving in a confined space so the trajectories are sometimes a bit weird. But the trajectory should also be checked with the Octomap collision map right? I am using arm_navigation with an UR5 robot.
Use collision map is on ( <arg name="use_collision_map" default="true"/>). Which other settings could be of influence? How can these collisions be prevented?
add a comment
