
slam map inconsistent
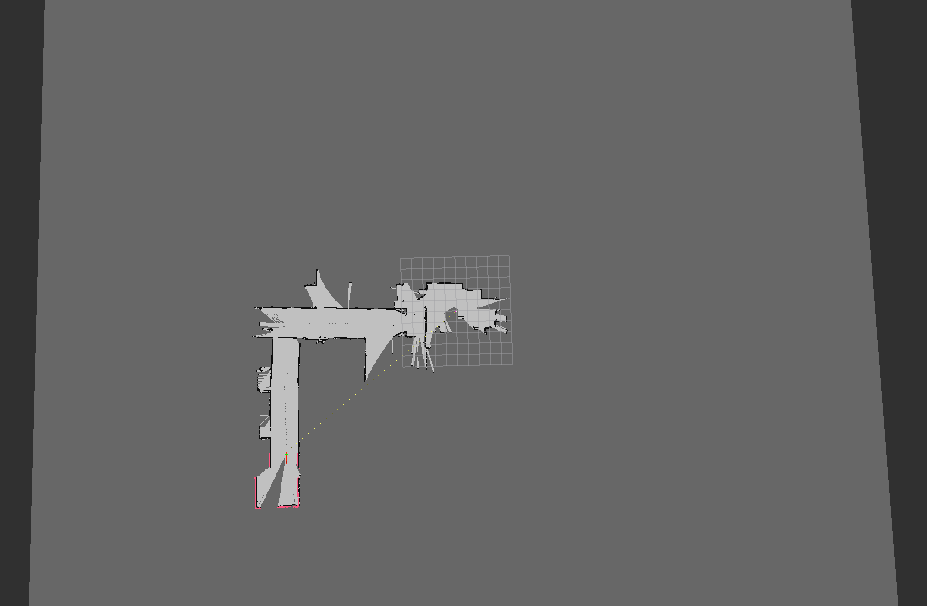
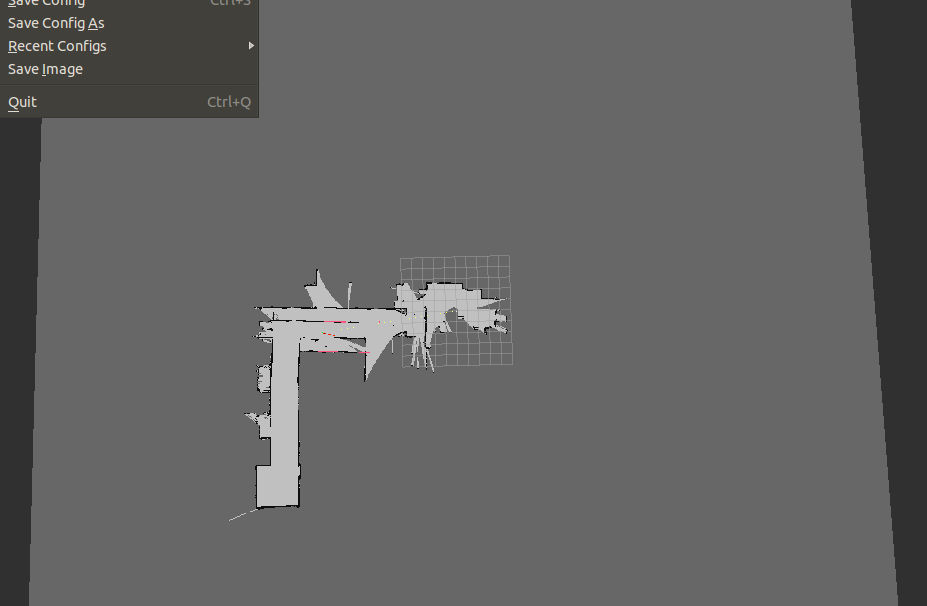
Hello, I was building a map using hector slam, the result was good but I found map inconsistent when the robot U - turn from a dead end. I don't have odometry on the robot. The first picture shows the robot is going in to a dead end. The second picture shows the robot go back to the corridor that it has scanned before. There is some inconsistency on the mapping which it seems like the robot don't 'remember' the corridor and mapping a new area. May I know how could I solve this problem? Or do I just avoid dead end at any cost? Thank you.
This is the parameter for the hector mapping
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<param name="use_tf_scan_transformation" value="true" />
>param name="use_tf_pose_start_estimate" value="false" />
<param name="scan_topic" value="scan" />
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Map size / start point -->
<param name="map_resolution" value="0.075"/>
<param name="map_size" value="512"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value="-2.5" />
<param name="laser_z_max_value" value="3.5" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.4" />
<param name="scan_subscriber_queue_size" value="25" />
<param name="map_multi_res_levels" value ="2"/>
</node>
add a comment
