
What am I doing wrong? Gmapping on Turtlebot Clone. I've pictures!

Hello all,
I've been scratching my head over this for a while now, and I would appreciate an explanation. If some of the angels on top high (like Melonee) could just give me a straightforward answer, it would be awesome.
Basically, I have been putting together my Turtlebot Clone over the past few weeks. Gotten around to doing some mapping recently, I am just using the standard demo as per suggested by the tutorials. However, I get errors, and mutated maps that even their own mothers couldn't love.
So, I have taken some screenshots to give you a step by step of what I am doing.
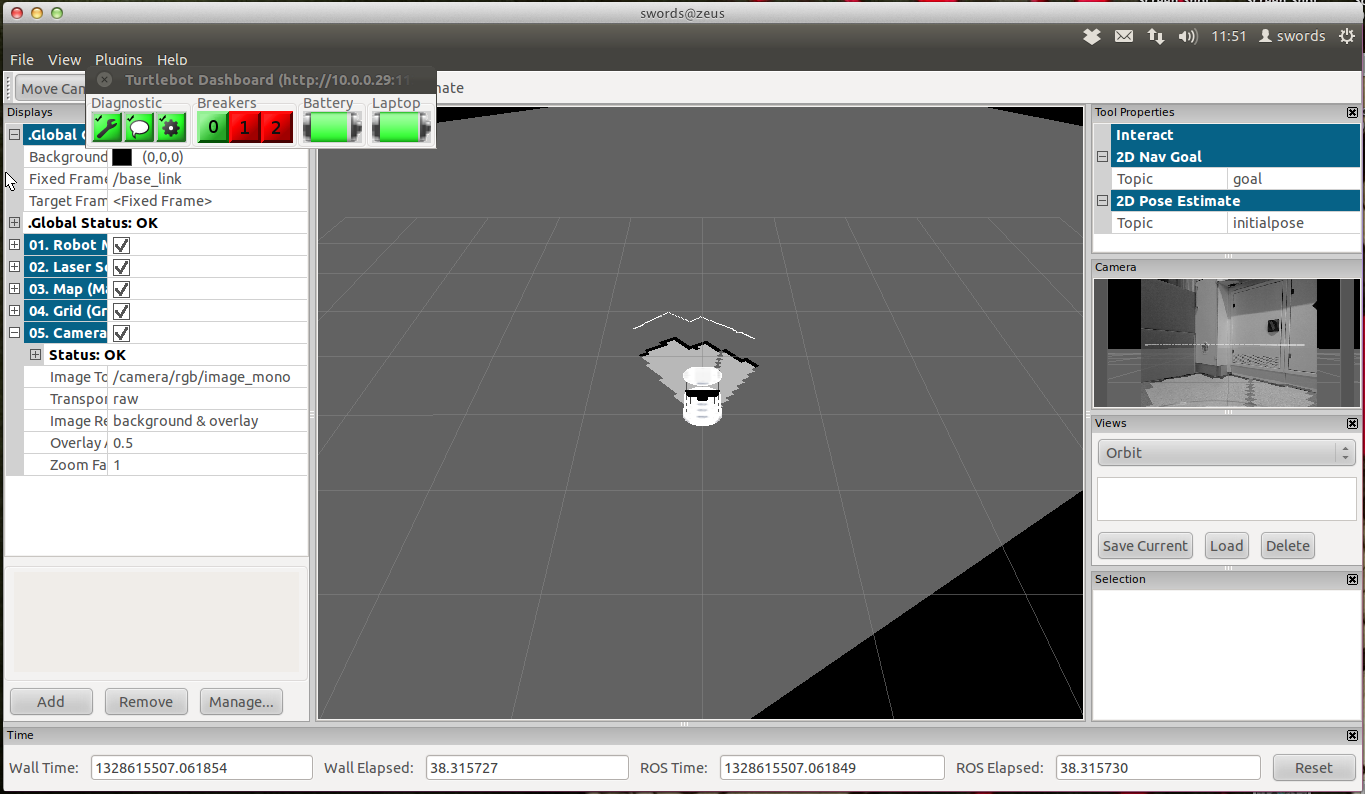
I start off with the above. I have my robot model, laser, map and camera all good to go. I have ran the gmapping launch file. You can see that the first parts of the occupancy grid is filling in. I have not moved the robot yet. There are no errors and we are all green on the dashboard.
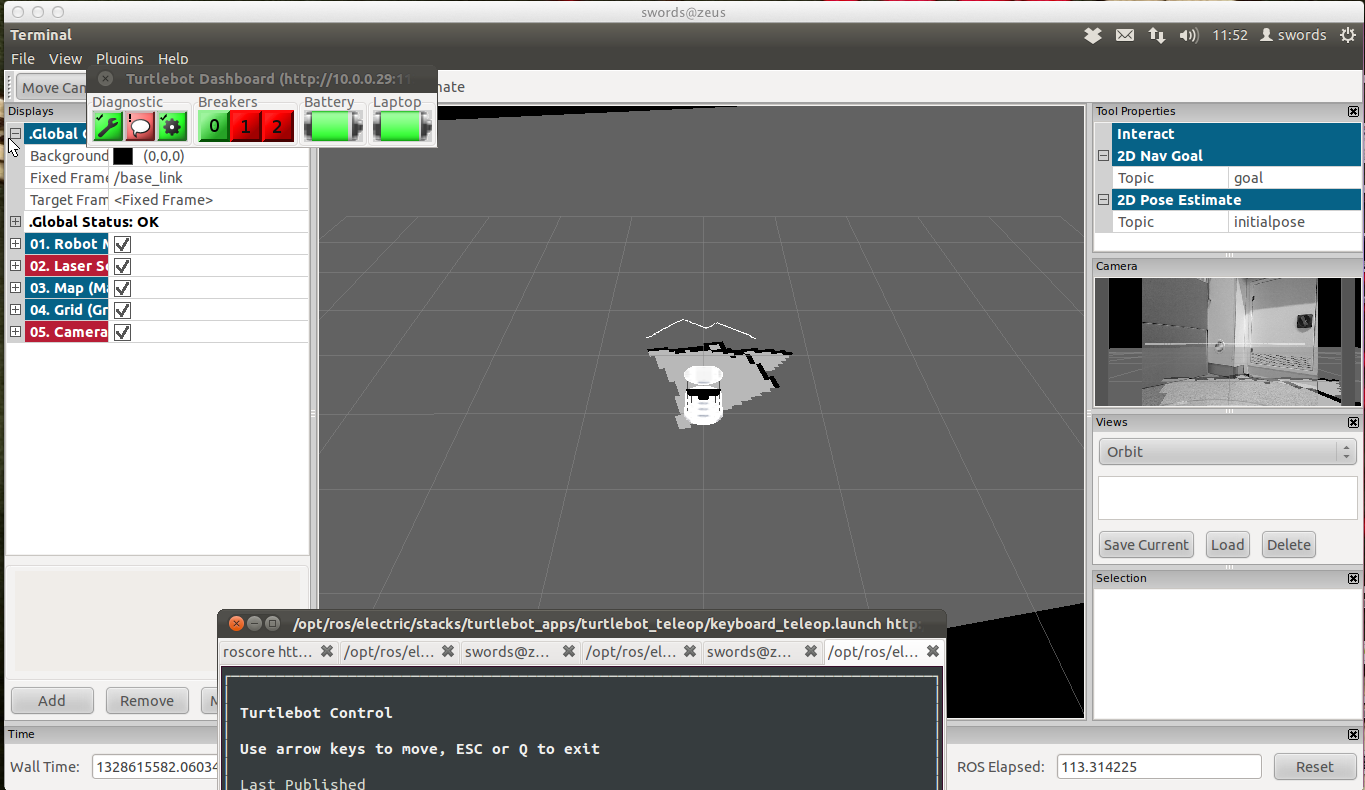
Now, I have moved the turtlebot slightly to the left. The occupancy grid expands, however errors start to appear from the dashboard. What do those errors look like you might ask? I'll show you.
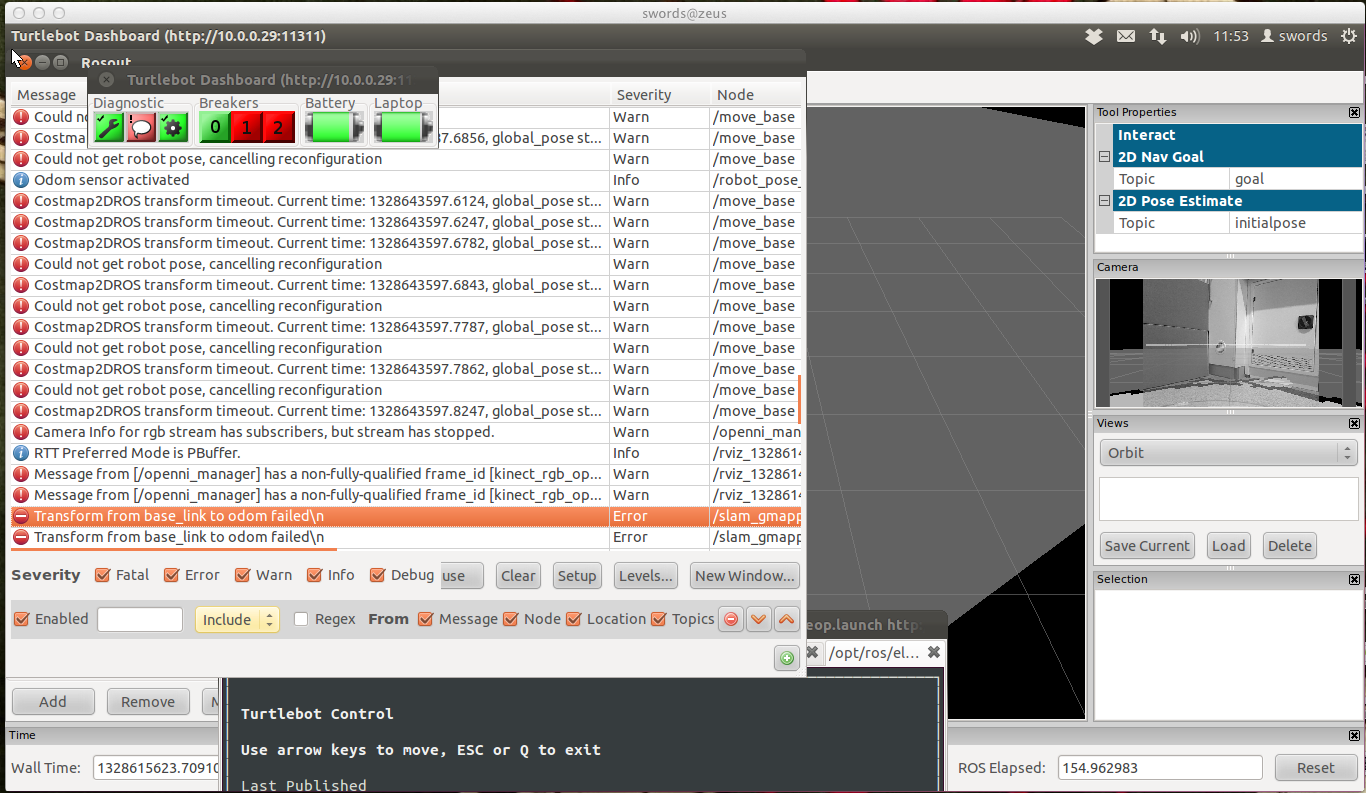
It is damn ugly I know. If I continue going around the environment, I will keep getting the error where the transform from base_link to odom fails. The only thing I touch in relation to launch files etc, is the minimal.launch. I don't use startup because teleop would not run when I did. I did the usual gyro config beforehand, and instead of putting the parameters into turtlebot.launch, I place them in minimal.launch. From what I can figure this should work fine. Correct me if I am wrong.
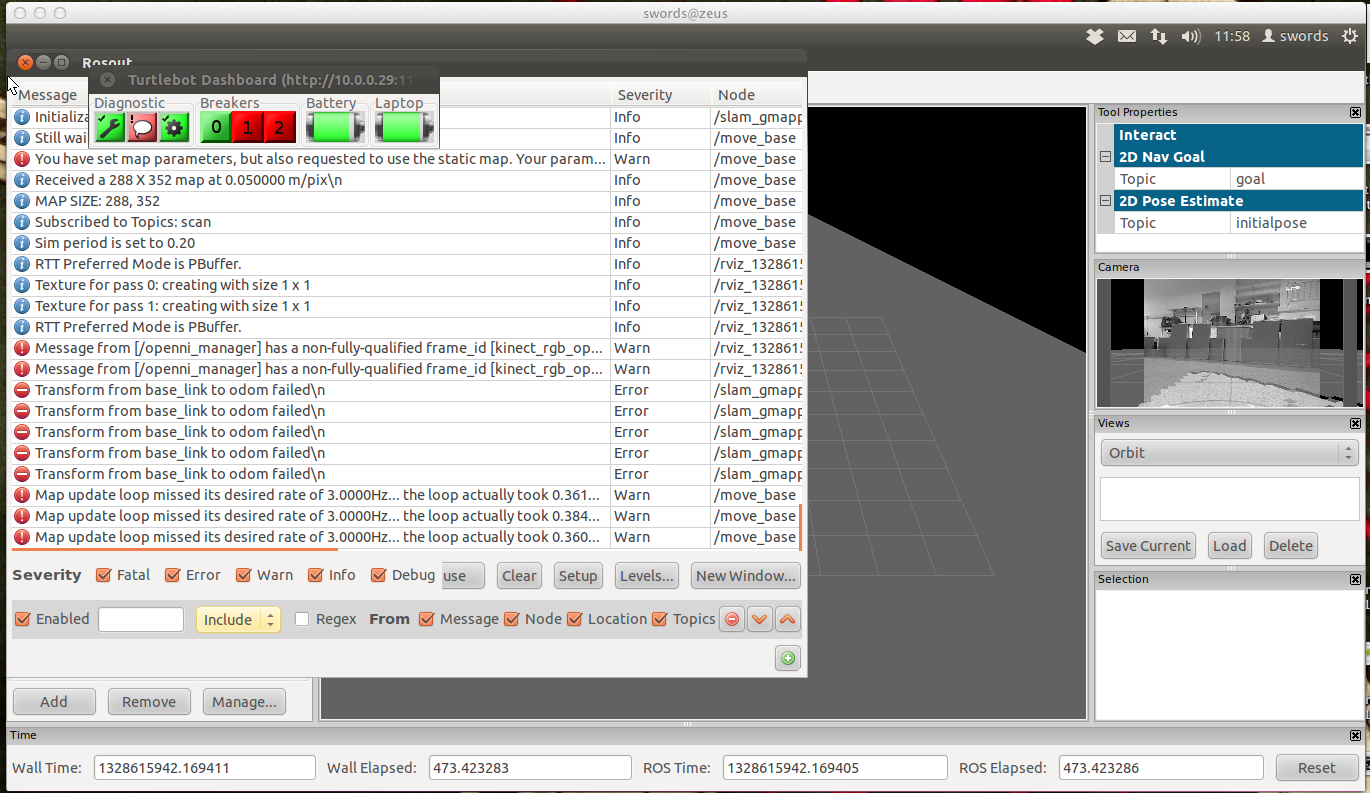
Now, if I continue around the map. I get another flavor of error. This time this is to do with a loop rate that isn't being met. It is usually just shy of it.

Now, if I continue on my merry way around the simple rectangular arena you see that obviously something is wrong. The two differences I can see from anyone else is how I do the bringup with the calibration values in the minimal.launch instead of the turtlebot.launch and I have a weaker netbook than what is suggest. If I had to put my money on it, I would say that it is the netbook not being fast enough.
You can look at the specs of the netbook I bought here.
My hands were a little tied with the choice, so this is why I didn't get something more powerful.
Again, I would really and truly like some feedback on what I might be doing wrong here, so I can zero in on the problem faster.
Thank you in advance.

