How to fix SIA10D ROS industrial robot loading model fail in RViz?
I followed ROS-Industrial Tutorial.
I run:
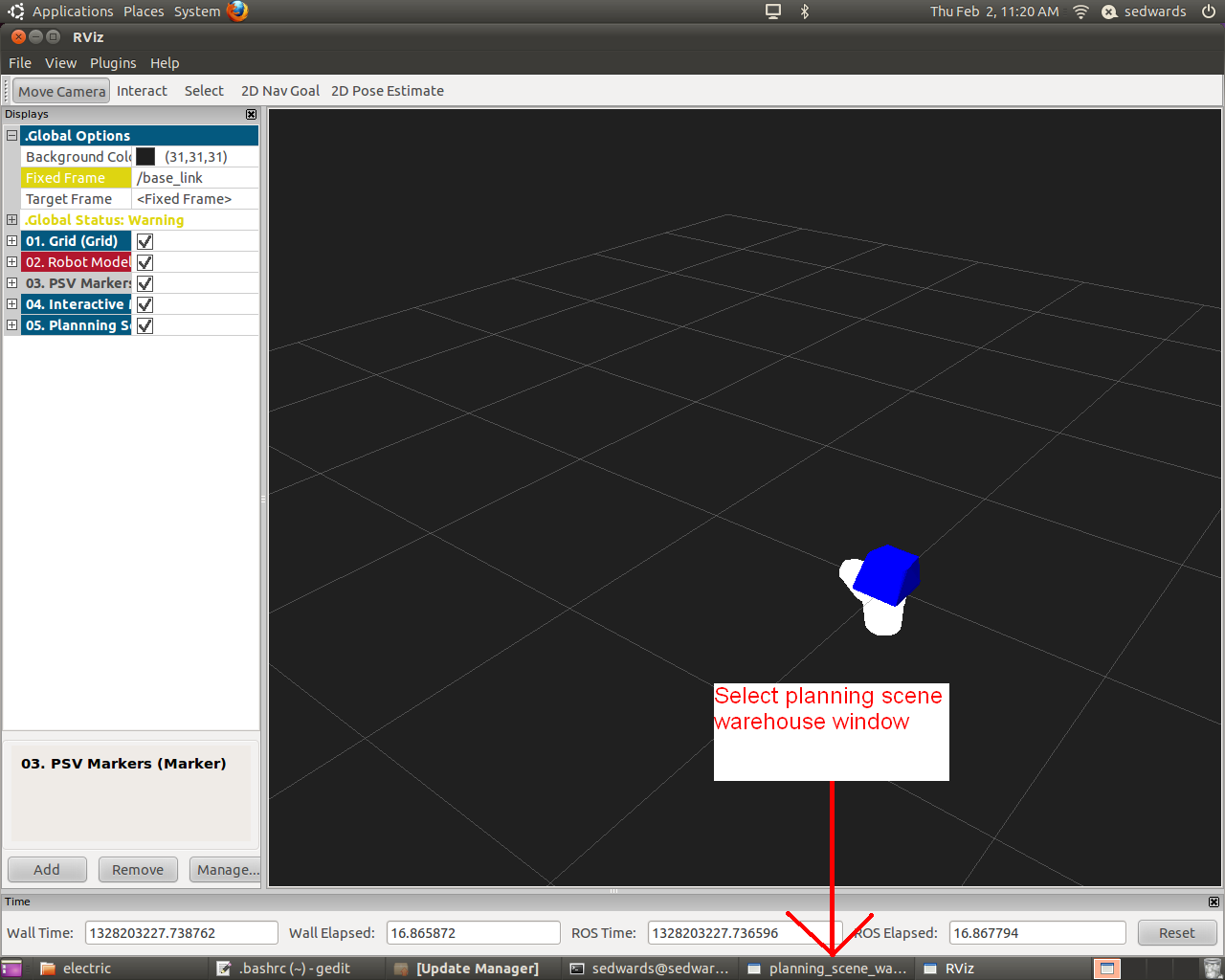
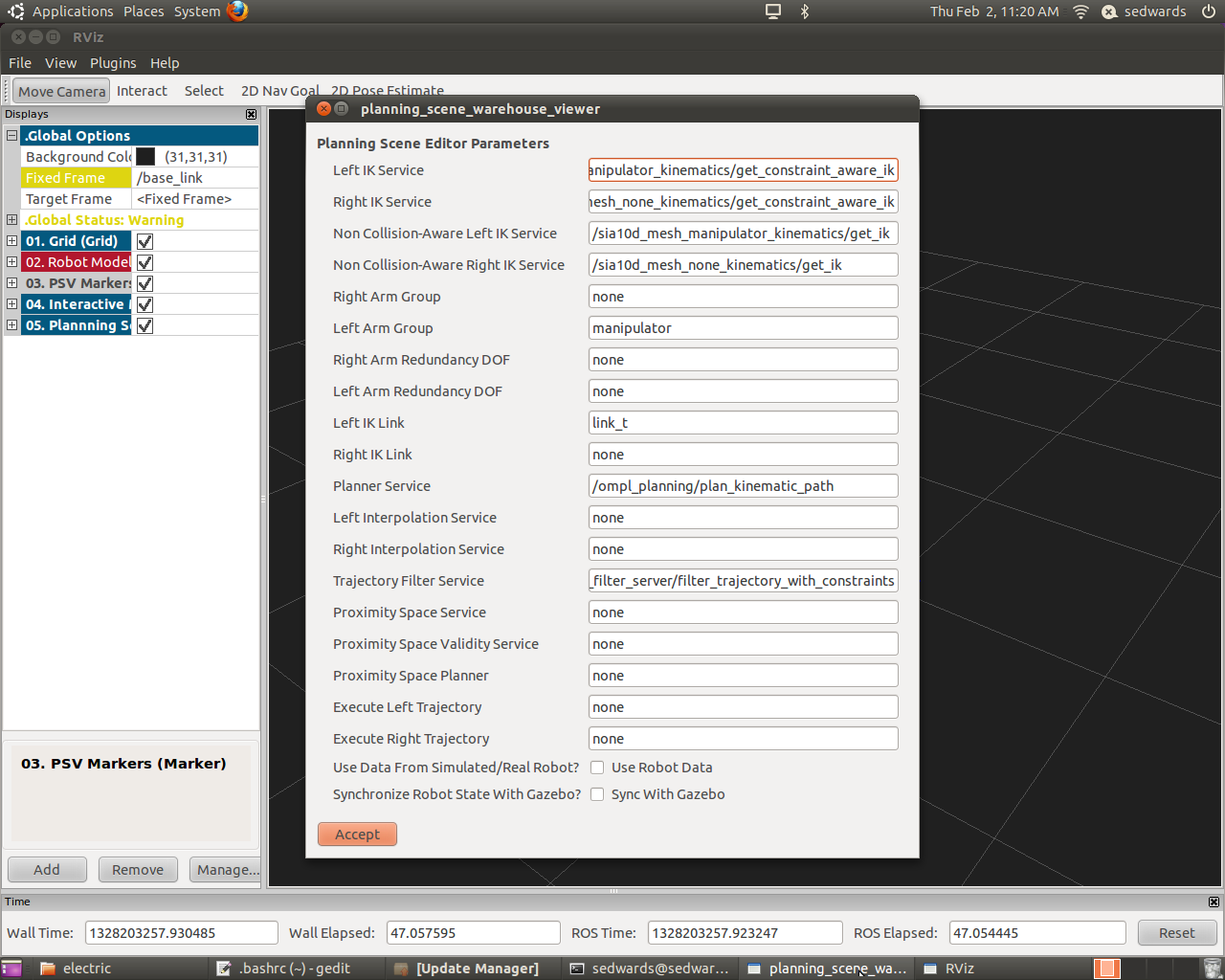
roslaunch sia10d_mesh_arm_navigation planning_scene_warehouse_viewer_sia10d_mesh.launch
And get partly loaded model of motoman robot.
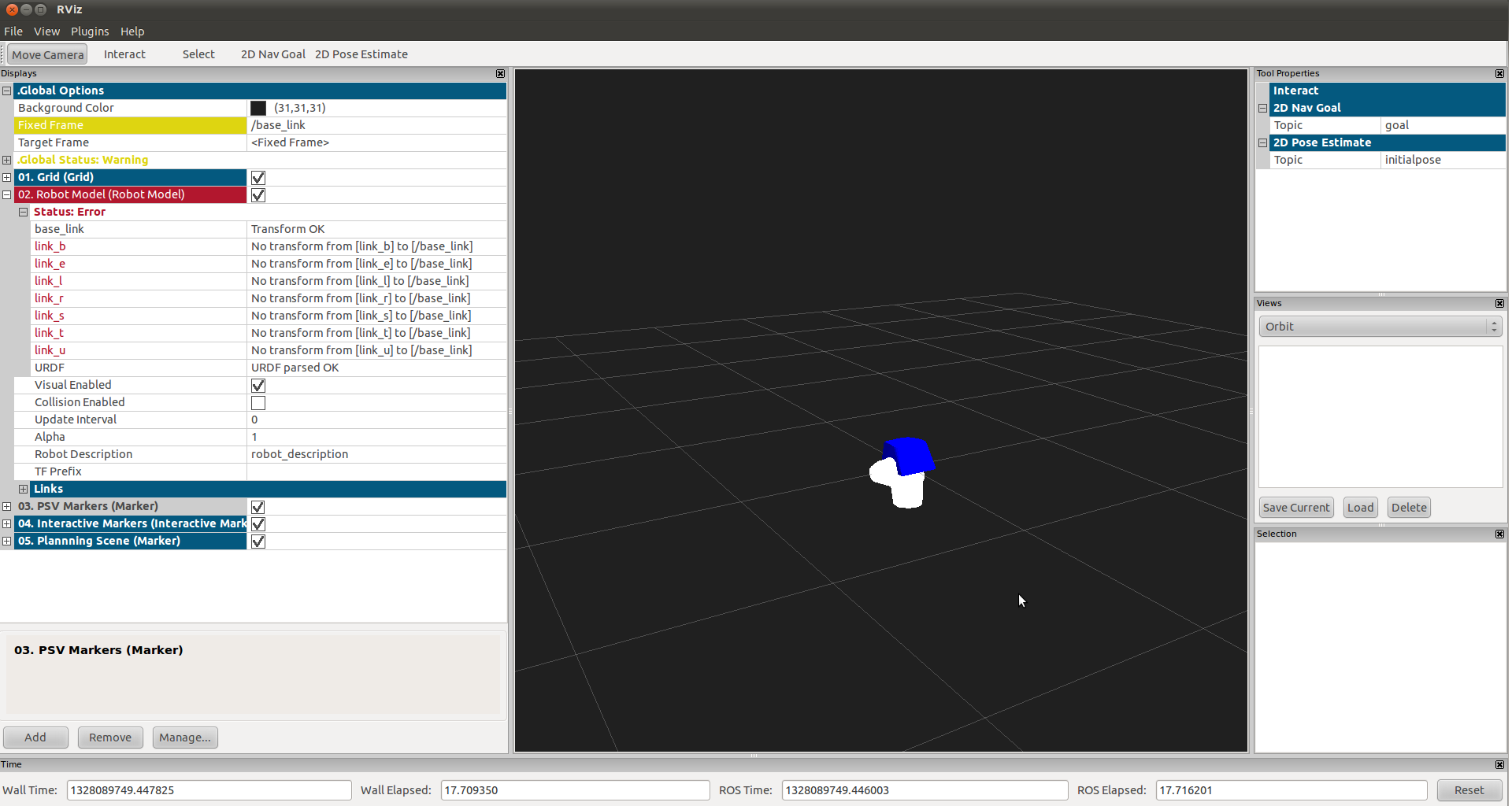
How to fixed it?
Thank you~
add a comment