
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
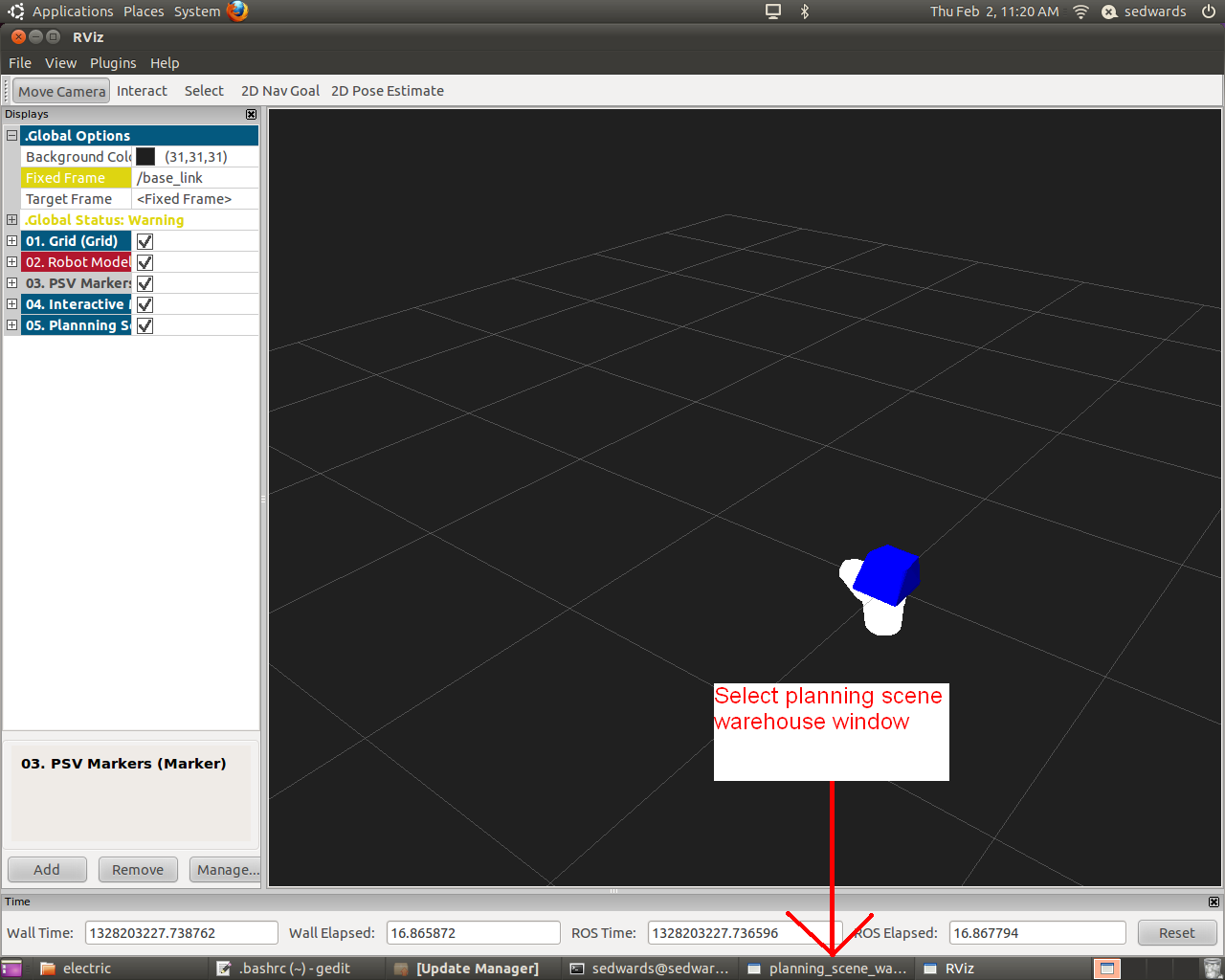
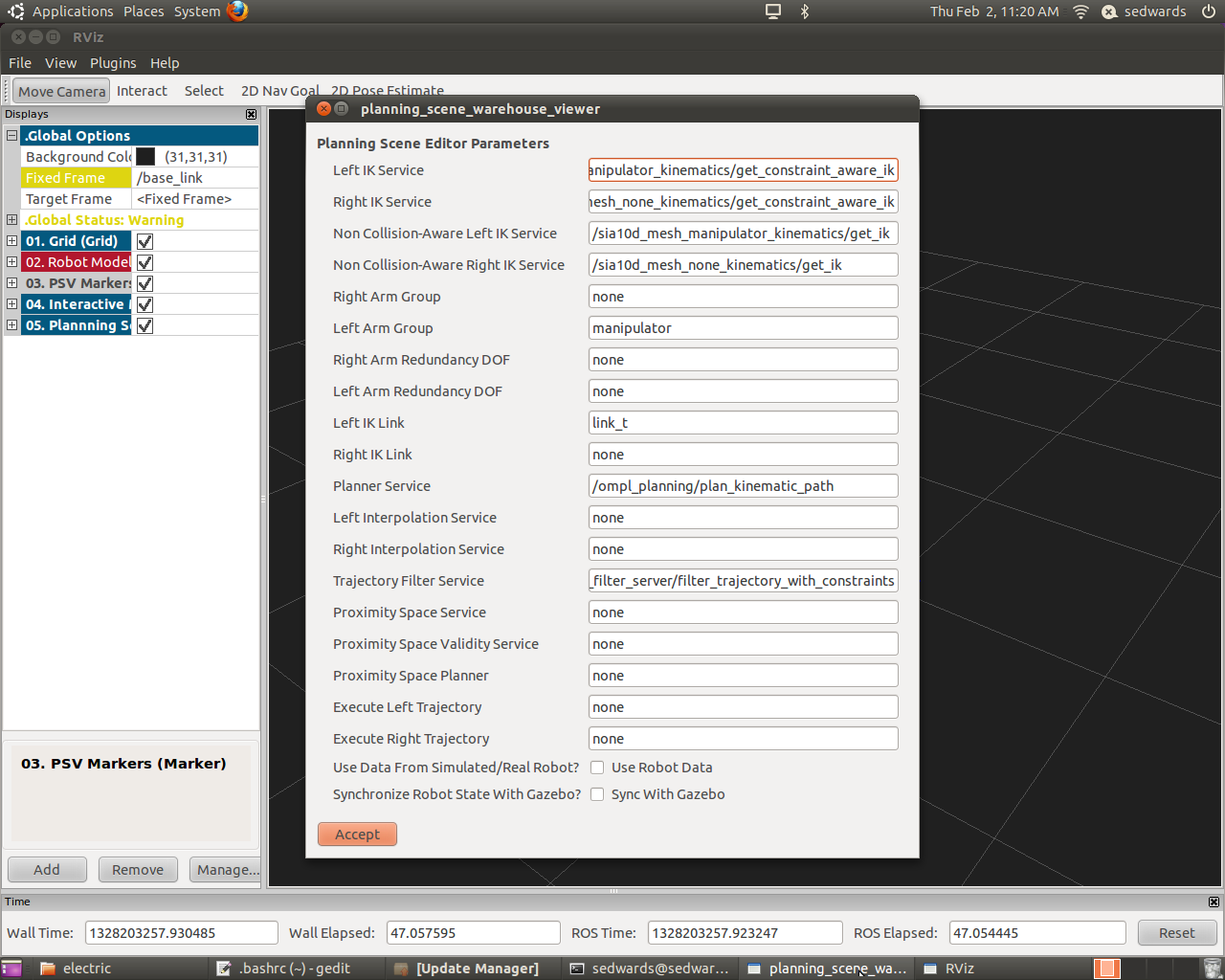
The problem you are seeing occurrs when the tf node is not generating the link transforms. This occurs because this node is probably not started yet. One reason can be that the warehouse planning configuration has not been accepted (the Rviz window sometimes hides the configuration dialogue when it starts up.
If this doesn't solve your problem, then you might not have the correct ROS libraries installed. Please include the roslaunch output if this procedure doesn't work for you.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.