
Turtlebot model appears only partially by using Interactive Marker

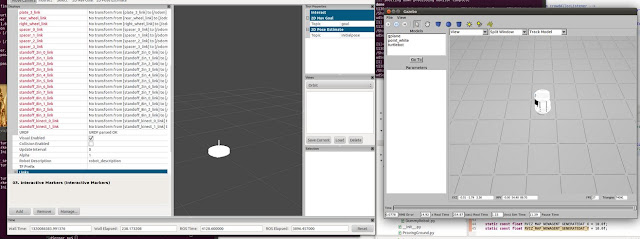
I assume in the sample at Turtlebot Interactive Marker tutorial, RViz requires sensor/joint inputs from actual Turtlebot or the mimicked Turtlebot on gazebo (similar is mentioned here about gazebo-RViz interaction too). So I launch both Turtlebot on gazebo (using turtlebot_gazebo stack) and the model on RViz (turtlebot_interactive_markers stack), but in my environment, only the base of Turtlebot is shown and RViz shows error on tf inputs (see snapshot below). Also, clicking "Interactive" on RViz doesn't allow the arrows that are shown in the example. Can anybody tell me what I should add on where?
launch file for the robot: http://pastebin.com/gAUmNL81. I also looked at turtlebot_viz/turtlebot_interactive_markers/src/turtlebot_marker_server.cpp but haven't figured out change that might fulfill my request.
I did sudo apt-get install ros-electric-turtlebot* and tried both on Ubuntu 11.04 & 10.10. Thanks.
PS. What I specifically want to do is to show Turtlebot on RViz, and let it move according to vel_cmd or similar message.

