
How to put more than one URDF model into RVIZ

Hello,
I would like to have more URDF models (next to robot's one) displayed in RVIZ (for example ipa-kitchen,cup, table...). How to do it correctly? Models have often same named links (dummy_link)...
This is my current solution, but there are some errors in RVIZ as you can see...
This is my launch file: http://pastebin.com/igmvk7cq
Model looks good in RVIZ, but there are errors in robot model.
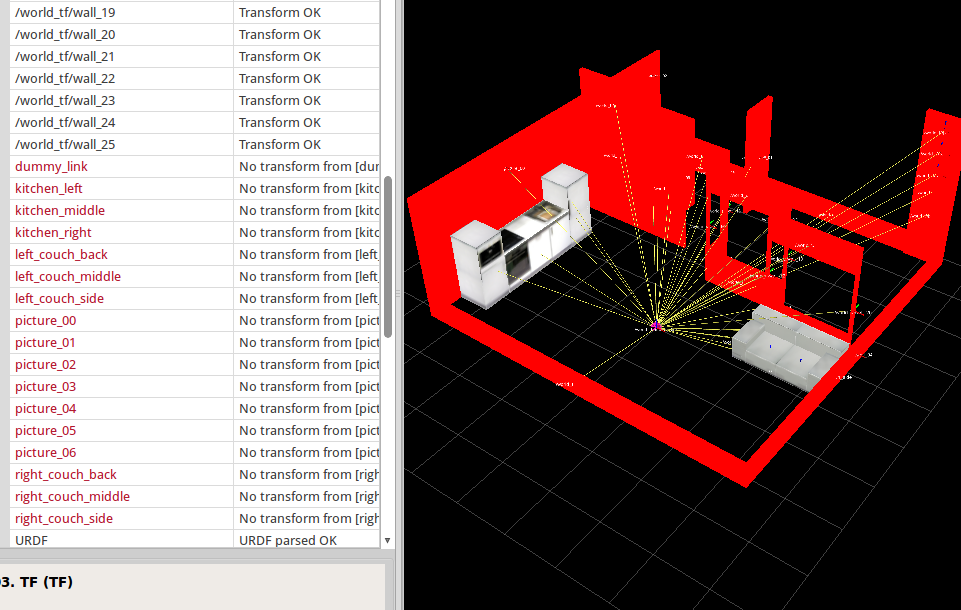
As you can see, there are /world_tf/xx transforms and also xx ones. Why?
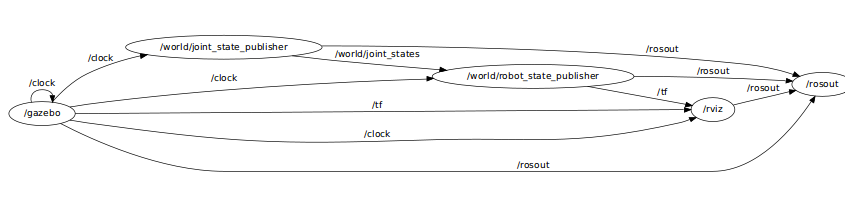
There is screenshot of rxgraph:
Output of roswtf:
Found 2 warning(s). Warnings are things that may be just fine, but are sometimes at fault WARNING The following node subscriptions are unconnected: * /gazebo: * /gazebo/set_model_state * /gazebo/set_link_state WARNING These nodes have died: * world/spawn_urdf_world-2 Found 7 error(s). ERROR Communication with [/rviz] raised an error: ERROR Communication with [/rosout] raised an error: ERROR Communication with [/rxconsole_1319534397534378303] raised an error: ERROR Communication with [/world/joint_state_publisher] raised an error: ERROR Communication with [/gazebo] raised an error: ERROR Communication with [/world/robot_state_publisher] raised an error: ERROR The following nodes should be connected but aren't: * /world/joint_state_publisher->/world/robot_state_publisher (/world/joint_states) * /gazebo->/rviz (/tf) * /gazebo->/world/robot_state_publisher (/clock) * /gazebo->/world/joint_state_publisher (/clock) * /rosout->/rxconsole_1319534397534378303 (/rosout_agg) * /gazebo->/rviz (/clock) * /gazebo->/gazebo (/clock) * /world/robot_state_publisher->/rviz (/tf)
Am I completely wrong with using join_state_publisher and robot_state_publisher (for fixed joints) or is there just some small mistake? Thanks a lot for any useful advice. Cheers :-)
add a comment

