
why local costmap rotates with robot [closed]

Hi: I got a strange problem. I am simulating a robot in gazebo and visualizing in rviz. My local costmap rotates as robot traverses along its planned path. I tried all options, double check with frames naming. Please refer to an image below.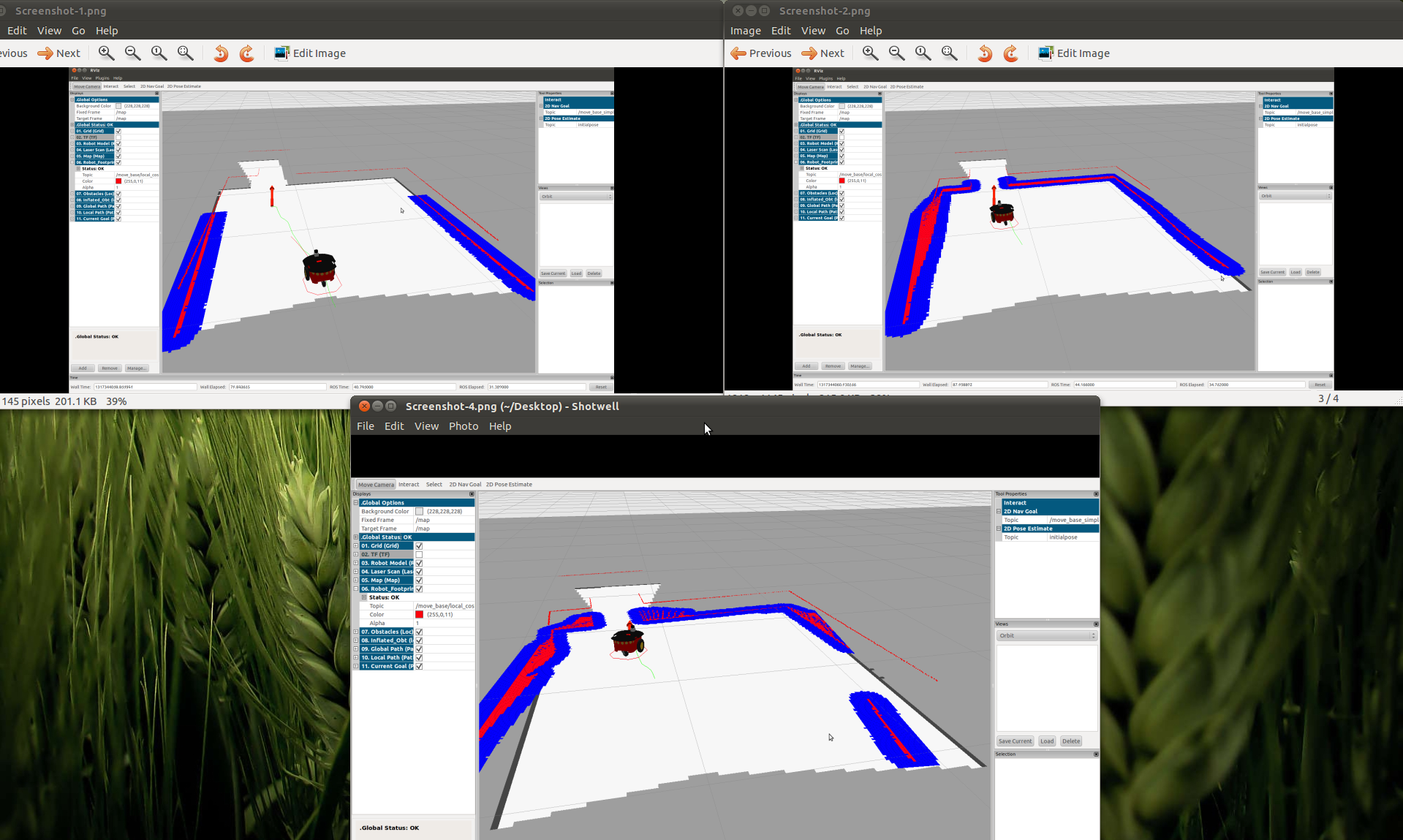
costmap configuration files are as follow:
costmap_common_params_sim.yaml
footprint: [[-0.18,-0.20],[-0.28,-0.10],[-0.28,0.10],[-0.18,0.20],[0.070,0.20],[0.180,0.10],[0.180,-0.10],[0.07,-0.20]]
inflation_radius: 0.75
cost_scaling_factor: 10.0
transform_tolerance: 2.0
observation_sources: laser_scan_sensor sonar_scan_sensor point_cloud_sensor
laser_scan_sensor: {sensor_frame: base_scan_link, data_type: LaserScan, topic: /scan,marking: true, clearing: true, obstacle_range: 10, raytrace_range: 10}
sonar_scan_sensor: {sensor_frame: base_link, data_type: LaserScan, topic: /myscan, marking: false, clearing: true, obstacle_range: 5.2, raytrace_range: 5.7, observation_persistence: 0}
point_cloud_sensor: {sensor_frame: base_scan_link, data_type: PointCloud2, topic: /marking, max_obstacle_height: 7, min_obstacle_height: 2, marking: true, clearing: false, obstacle_range: 4.9, raytrace_range: 4.9, observation_persistance: 0}
global_costmap_params.yaml
global_costmap:
global_frame: map
robot_base_frame: base_footprint
map_type: costmap
unknown_cost_value: 1
track_unknown_space: true
obstacle_range: 10.0
raytrace_range: 10.0
update_frequency: 0.5
publish_frequency: 0.2
static_map: true
local_costmap_params.yaml
local_costmap:
global_frame: odom
map_type: costmap
robot_base_frame: base_footprint
obstacle_range: 2.0
raytrace_range: 2.0
update_frequency: 5.0
publish_frequency: 1.0
inflation_radius: 0.35
static_map: false
rolling_window: true
width: 6.0
height: 6.0
origin_x: 0.0
origin_y: 0.0
resolution: 0.025
I am just using laser sensor to get the data in simulation. So "sonar_scan_sensor" and "point_cloud_sensor" in costmap_common_params_sim.yaml are not in use.
Closed for the following reason
the question is answered, right answer was accepted by
Procópio
close date 2016-04-28 03:51:36.362688
Comments
Could you include your costmap configuration files?
Have you looked at TF information in rviz? Specifically, you'd want to look at whether the odometric frame moves as expected relative to the map frame. If you see it rotate strangely, something is wrong in your odometry.
add a comment

