
AddingSensorsToPR2 tutorial errors
Hi guys,
I am going through the urdf/Tutorials/AddingSensorsToPR2 tutorial. This tutorial basically shows how to add new links and attach sensors to a link in gazebo. Although the new links and joints can be added and viewed properly:
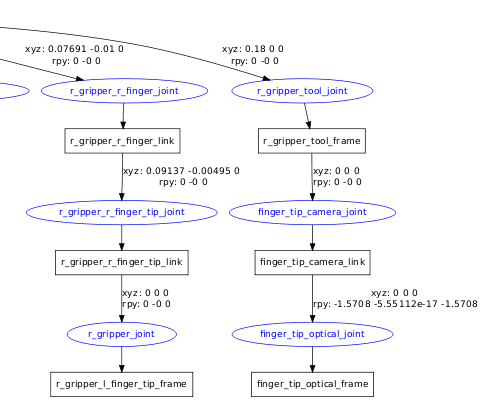
I can find the ROS topic for the added camera. Here is a part of my xacro file, slightly modified from the original file on the tutorial page.
<gazebo reference="finger_tip_camera_link">
<sensor:camera name="finger_tip_camera_sensor">
<imageSize>640 480</imageSize>
<imageFormat>BAYER_BGGR8</imageFormat>
<hfov>90</hfov>
<nearClip>0.01</nearClip>
<farClip>100</farClip>
<updateRate>25.0</updateRate>
<controller:gazebo_ros_camera name="finger_tip_camera_controller" plugin="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>25.0</updateRate>
<imageTopicName>finger_tip_cam/image</imageTopicName>
<cameraInfoTopicName>finger_tip_cam/camera_info</cameraInfoTopicName>
<frameName>finger_tip_camera_link</frameName>
<interface:camera name="finger_tip_camera_iface" />
</controller:gazebo_ros_camera>
</sensor:camera>
<turnGravityOff>true</turnGravityOff>
<material>PR2/Blue</material>
</gazebo>
I didn't see any error message, just couldn't find the ROS image topic, which should be finger_tip_cam/image in this case.
Any idea what goes wrong and where can I find the documentation on the syntax of gazebo_plugin. The Ros Camera Plugin XML Reference and Example here is fairly limited, not detailed enough for me to understand...
Comments
It sounds like you've already answered your own question. Please close off this question if that is the case and don't incrementally ask new questions (use new posts to ask different questions).
sorry for that, what should I do to close off this question?
Post the entire solution as an answer and then one of the site admins can come along and mark it as the actual accepted answer (currently, I don't think you can accept your own answer to your own question).
thank you i'll do that
add a comment
