
move_base changes clock of mapping node


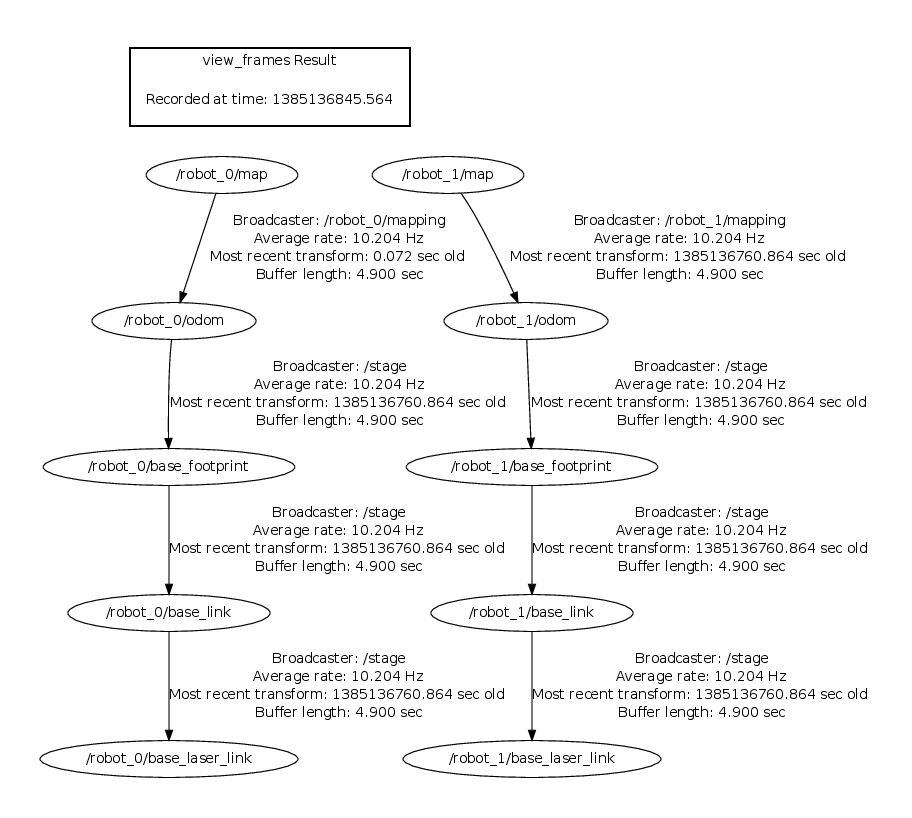
Hi, i am using stage to simulate two robots. Mapping runs, but if i start move_base for the first roboter, its tf stops working. So i researched a little bit and found out that if i start move_base for robot_0 the map frame is published with a total different time. On the left (robot_0) with move_base started, on the right (robot_1) without move_base.
Why is the Most recent transform changing?
And now move_base throws the following warning:
[ WARN] [1385137274.474605959]: Waiting on transform from /robot_0/base_footprint to /robot_0/map to become available before running costmap, tf error: Unable to lookup transform, cache is empty, when looking up transform from frame [/robot_0/base_footprint] to frame [/robot_0/map]
The tf tree is correct, so i take a look at the move_base source and the error is thrown in costmap_2d_ros.cpp:165
I have tried setting use_sim_time to true and to false, but the result always keep the same. And i used gmapping and hector_mapping, get the same problem by both
Anyone an idea how to solve that?

if you need more information, just tell me