
Preplexing local cost map problem
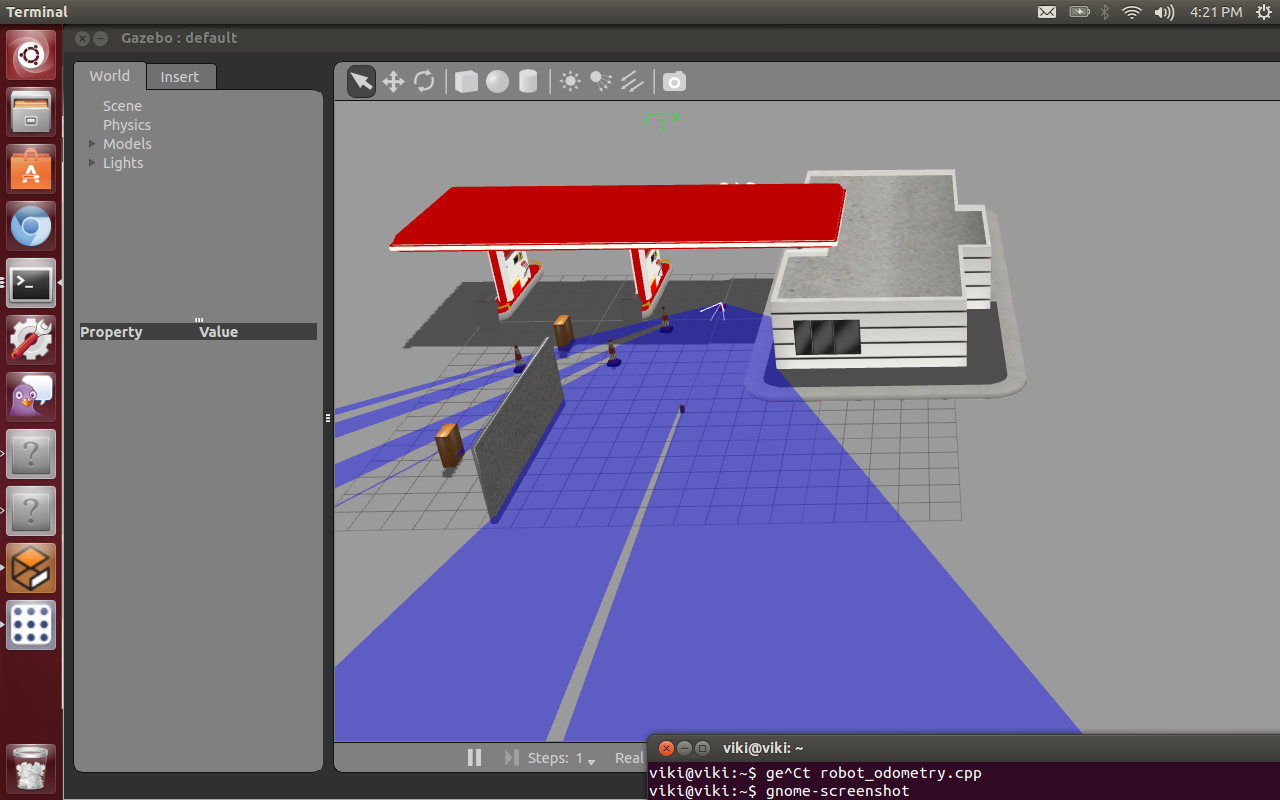
Update: 3 images one with after set position issued. One with global map on, one with global map off, and the gazebo image of the simulation.
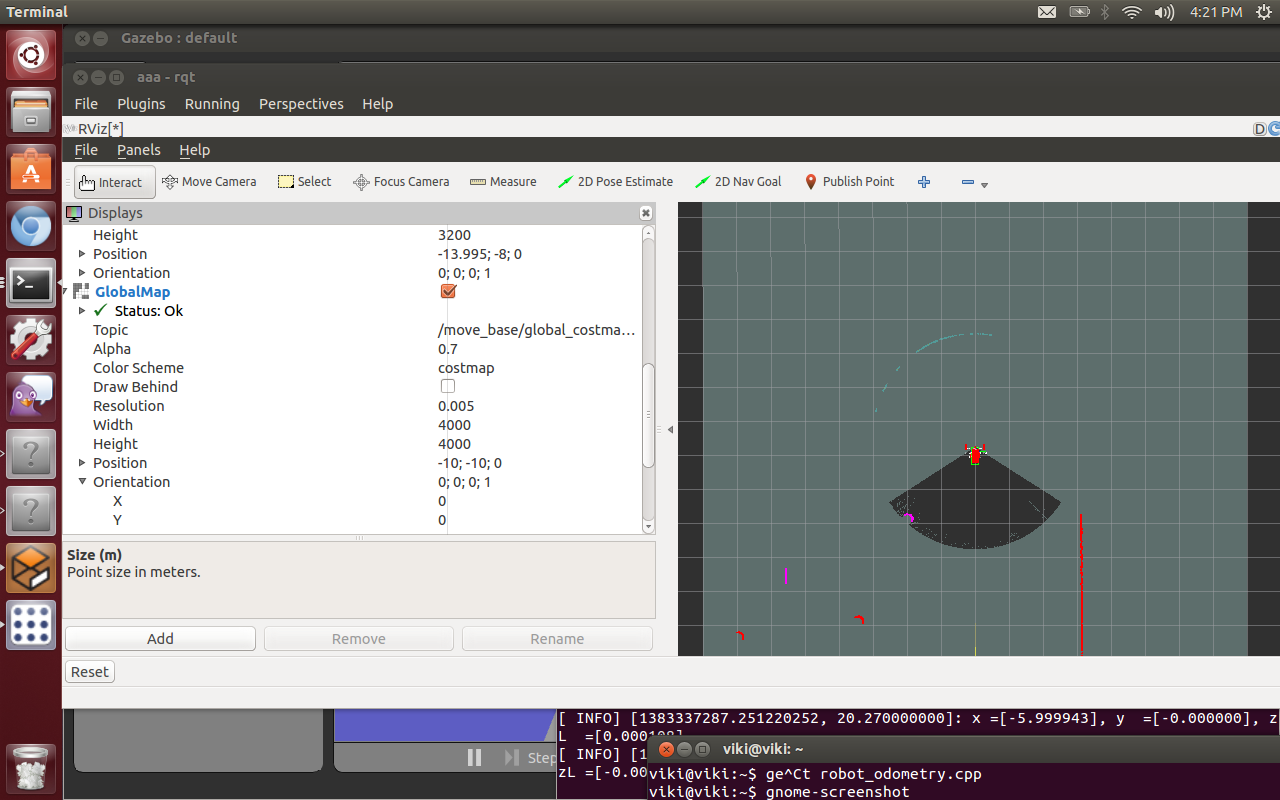
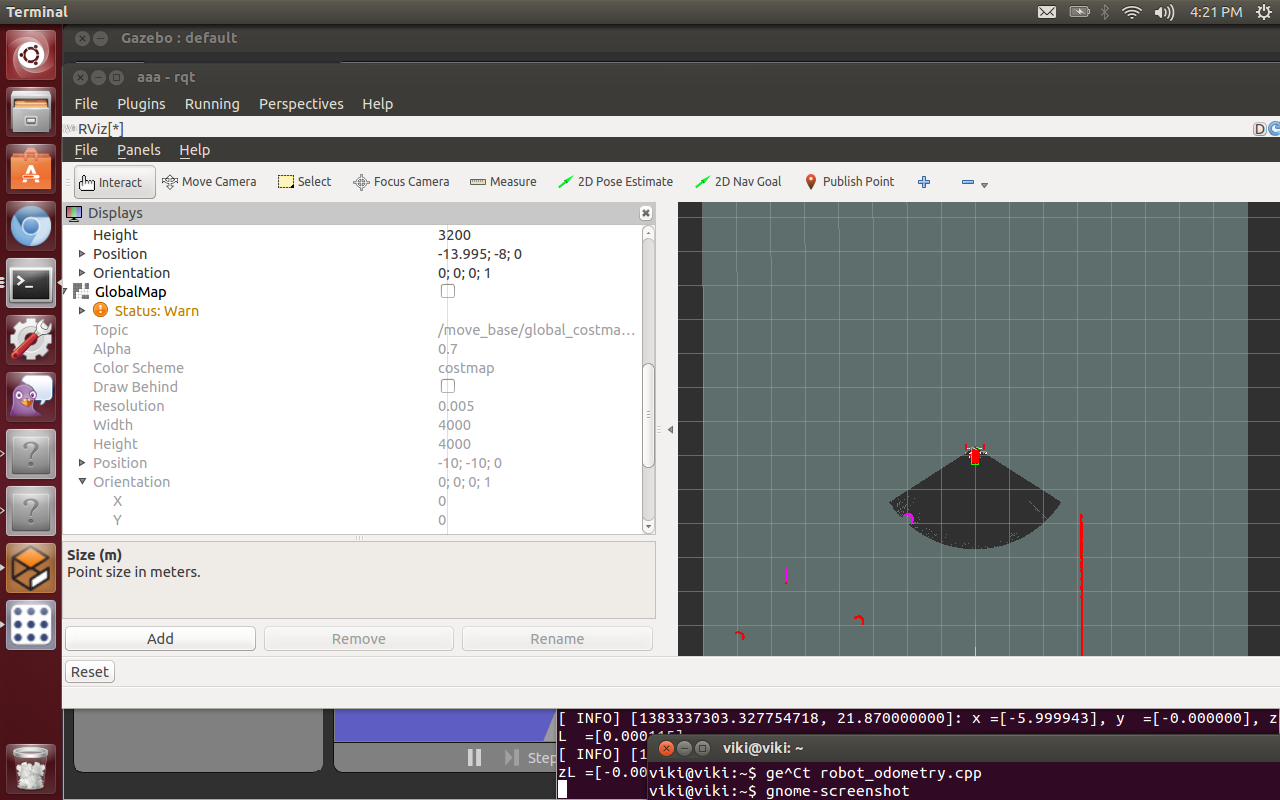
Update: setting the static map parameter to false in the global_costmap yaml file and the blue map line disappears. Not sure why since the static map is blank. Turning off the Global Map panel (topic: /move_base/global_costmap/costmap) in rivz also makes the blue line go away.
Update using a the light blue crescent map shape is coming from nav_msgs::OccupancyGrid topic /move_base/global_costmap/costmap. When I toggle the global panel off this line disappears. Not sure what this line represents. Robot still runs backwards in both rviz and gazebo if DWA is on.
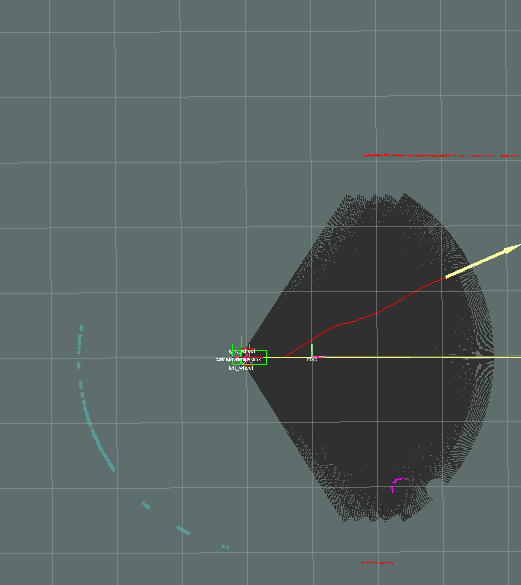
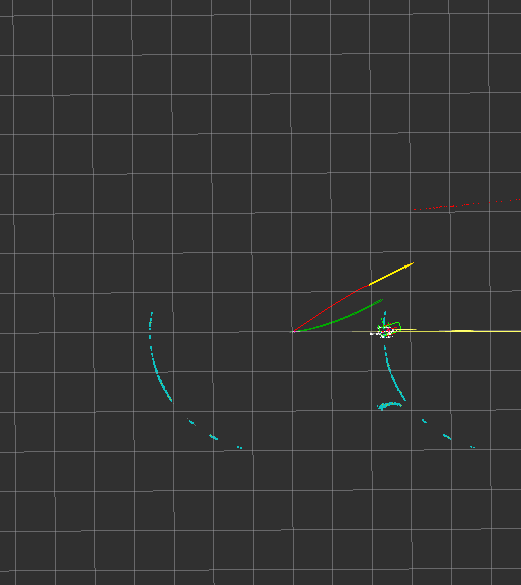
When I run with the local cost map parms below my robot in rviz and gazebo run backwards and it plots no local (green) path. The aqua blue dots seem to be map related while the red dots are laser. Note they seem to have different orientations. But why?
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 30.0
publish_frequency: 30.0
static_map: true # note setting to false removes blue line
width: 20.0
height: 20.0
origin_x: -10.0
origin_y: -10.0
local_costmap:
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 10.0
publish_frequency: 10.0
static_map: false
rolling_window: true
width: 16.0
height: 16.0
origin_x: 0.0
origin_y: 0.0
when I run with
static_map: true
rolling_window: false
my robot runs forward and does display a current local path. These are the only changes I make to get this results. Static map can be set to false here and as long as DWA is false also it will move forward.

What release are you running?
Also, the blue dots are your laser scans, and they are where you expect them to be?
I am running the latest hydro and gazebo 1.9. The blue dots do not make since to me...since the laser is pointing in the opposite direction. The active laser scan are the red dot and cresent line above the yellow goal arrow. The blue dots are maybe the map data but why are they on the other side.
You have displayed global costmap and shown the local costmap parameters. Can you check global costmap parameters.
Is your configuration using the ObstacleLayer or the VoxelLayer?
I am strictly 2d ObstacleLayer
Can you clarify what topic you're seeing the blue dots in your visualization from?
updated question with topic data. /move_base/global_costmap/costmap