
local costmap not showing in rviz2
Background info:
ROS 2 info:
ROS_VERSION=2 ROS_PYTHON_VERSION=3 ROS_LOCALHOST_ONLY=0 ROS_DISTRO=galactic
Problem:
Hello all,
I am encountering a very strange issue in rviz2.
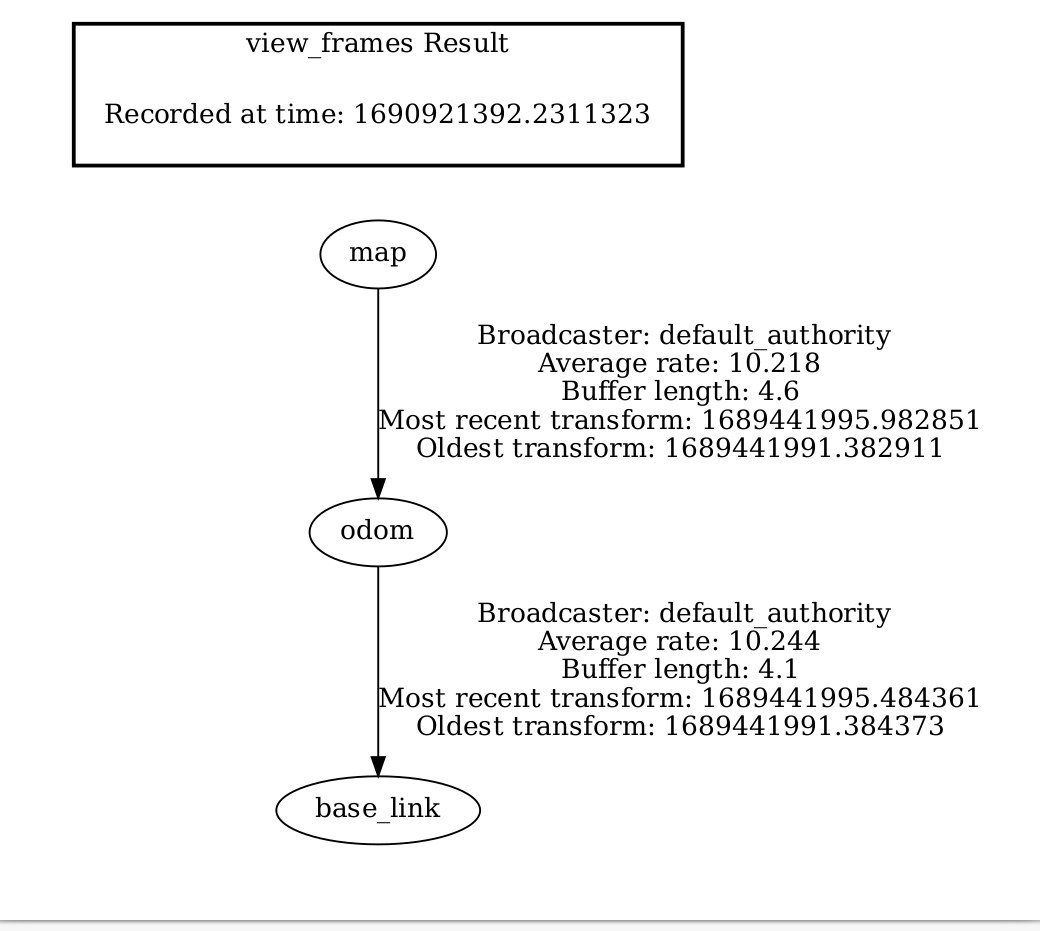
I have recorded a ros2 bag that contains tf transform from map->odom->base_link by using the robot_localization package, as shown below.
After I launch my Nav2, I was able to see both map information on both /global_costmap/costmap and /map topics. However, I was not able to see the local_costmap on /local_costmap/costmap.
Moreover, when I tried to echo to the local_costmap/costmap topic, I was able to see information published on the local_costmap, as shown below.

Error Code:
The only that I have gotten a "Message Filter dropping message: frame 'odom' at time 1690921914.628 for reason 'discarding message because the queue is full' message in the rviz2 terminal, as shown below. According to a similar ros answer, the issue is caused by a missing transform. However, I don't think to be the case in this situation, because I do have a complete TF transform from map -> base_link as shown in the first picture.

Things I have tried:
- Change the QOS setting in rviz2 from Reliable to Best Effort, as shown below. However, I am still not getting any update in Rviz2 for local costmap. Note: the moving of the robot (red and green arrow) is just a replay of history from the bag, I have not yet set a goal to Nav2 to tell it where to move the robot.
- According to This ros answer, I have double-check that my RMW_IMPLEMENTATION ins cyclonedds, which is the default of Galactic.
configure file
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_link
odom_topic: /odometry/global
bt_loop_duration: 10
default_server_timeout: 20
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
controller_server:
ros__parameters:
# controller server parameters (see Controller Server for more info)
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 1.0
yaw_goal_tolerance: 6.29
stateful: True
# DWB controller parameters
FollowPath:
transform_tolerance: 5.0
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: False
forward_prune_distance: 0.2
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.0
max_vel_y: 1.0 # 1.0 # was 2.23
max_vel_theta: 0.5 # 0.5 # was 1.0
min_speed_xy: 0.0
max_speed_xy: 1.0 # 0.5 # was 2.23
min_speed_theta: 0.0
acc_lim_x: 0.0
acc_lim_y: 1.25
acc_lim_theta: 3.2
decel_lim_x: 0.0
decel_lim_y: -2.5
decel_lim_theta: -3.2
vx_samples: 1
vy_samples: 20
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
angular_granularity: 0.025
xy_goal_tolerance: 1.0
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics ...