
Improve range of trajectory planning for UR arm
Re-editted: I am searching for a way to increase the flexibilty of planning of the UR arms attached to husky robot (please see picture attached). Currently , moveit is unable to successfully plan routes to trajectory points the arms can definitely go to. I am using the set_goal_orientation_tolerance and set_planning_time class functions from the MoveGroupCommander to try to improve tolerance of goal orientation and time allocated to calculate trajectories. None of these have particularly worked. I am currently thinking of other things to try but don't know how to do them or if they are possible. These are the failure outputs I am currently getting:
........................
[ INFO] [1689009074.852119144]: Combined planning and execution request received for MoveGroup action. Forwarding to planning and execution pipeline.
[ INFO] [1689009074.852199812]: Planning attempt 1 of at most 1
[ INFO] [1689009074.855100346]: Planner configuration 'manipulator_left' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed.
[ INFO] [1689009074.855702955]: manipulator_left/manipulator_left: Starting planning with 1 states already in datastructure
[ERROR] [1689009084.863279662]: manipulator_left/manipulator_left: Unable to sample any valid states for goal tree
[ INFO] [1689009084.863389537]: manipulator_left/manipulator_left: Created 1 states (1 start + 0 goal)
[ INFO] [1689009084.863478096]: No solution found after 10.008166 seconds
[ WARN] [1689009084.863536200]: Timed out
[ INFO] [1689009084.879338482]: Unable to solve the planning problem
.......................................
These are the possible solutions I am currently thinking of implementing at the current moment:
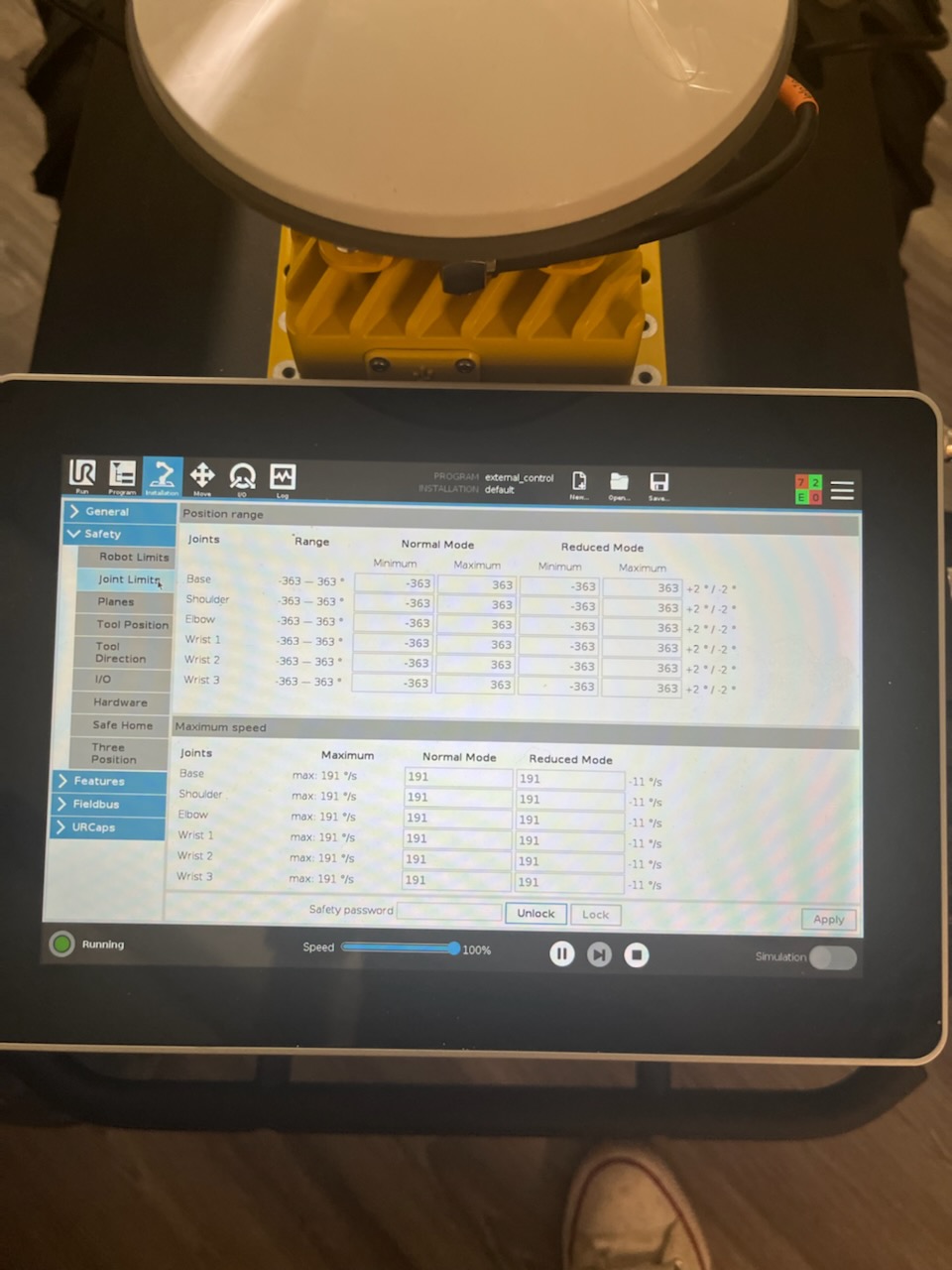
[i] The UR arms have safety joint limits (for every joint) set in the UR arm driver interface (see image below). Would increasing (so instead of -363 to 363 I set a joint limit to -500 to 500) or decreasing the joint limits improve the number of ways the arm might reach a goal, therefore increasing the possibility of calculating a successful path? would modifying joint limits from the driver interface in any way affect how moveit calculates paths? Is there some parameter in the moveGroupCommander I would have to set as well?
[ii] The husky manipulation package shows I that in making custom moveit configs you set up stuff like the collision matrix and other parameters I think. Is there something in the custom husky_ur_robotiq_2f_85_moveit_config I can mess around with which to improve tolerance of motion?


I don't believe anyone can really say anything here because you don't describe what the problem is you encounter.
the arms definitely don't do any path planning, so pedantically, this sentence is unhelpful.
You imply you are using MoveIt, so perhaps the question is about that, but seeing as you don't show any errors or warnings (verbatim) it's hard to tell what's not working.
I'm not going to claim you'll get 100+ answers after posting more information, but I would still recommend you improve your question by clarifying what it is that's happening, what you believe should happen, supported by verbatim copy-pastes of errors, warnings or info messages from the involved components.
@gvdhoom okay I'll do so, thanks!
@gvdhoorn just re-editted the question. Hope it makes more sense now.