
ROS2 topic name validation
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
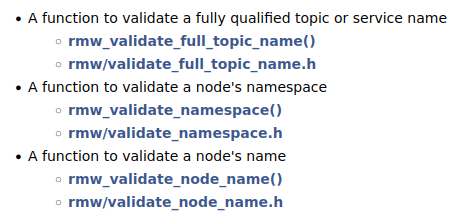
There are some common utility functions in combination with "Topics" or "Services" in rmw: ROS Middleware Abstraction Interface:
https://docs.ros2.org/latest/api/rmw/
Asked: 2022-03-14 15:09:39 -0500
Seen: 195 times
Last updated: Mar 15 '22
Transform data too old when converting from map to odom in nav2_straightline_planner
What went wrong with the installation?
how to delete a subcriber/publisher in rclpy
ROS2 symlinks and SHARED libraries
Control the Gazebo camera with ROS topics
Default transform direction if tf2?
Make gazebo subscribe to a ROS topic?
How to update map in source file with SLAM using what package in ROS2?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
