
ROS2 topic name validation
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
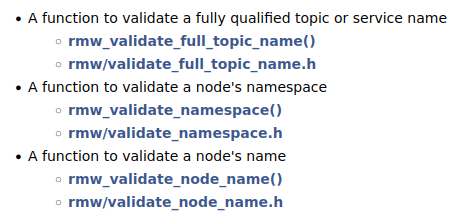
There are some common utility functions in combination with "Topics" or "Services" in rmw: ROS Middleware Abstraction Interface:
https://docs.ros2.org/latest/api/rmw/
Asked: 2022-03-14 15:09:39 -0500
Seen: 189 times
Last updated: Mar 15 '22
ROS 2 Foxy Communication between Singularity Containers
Is there roslaunch python package in ros2?
Callback upon parameter change in other node
Running Python launch files with arguments
Intra-Process Communication between Components in Container
Change default topic name of joint_state_broadcaster?
ROS2 through docker: failed to configure logging: Failed to create log directory
Problems with a Bazel build of ROS2
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
