
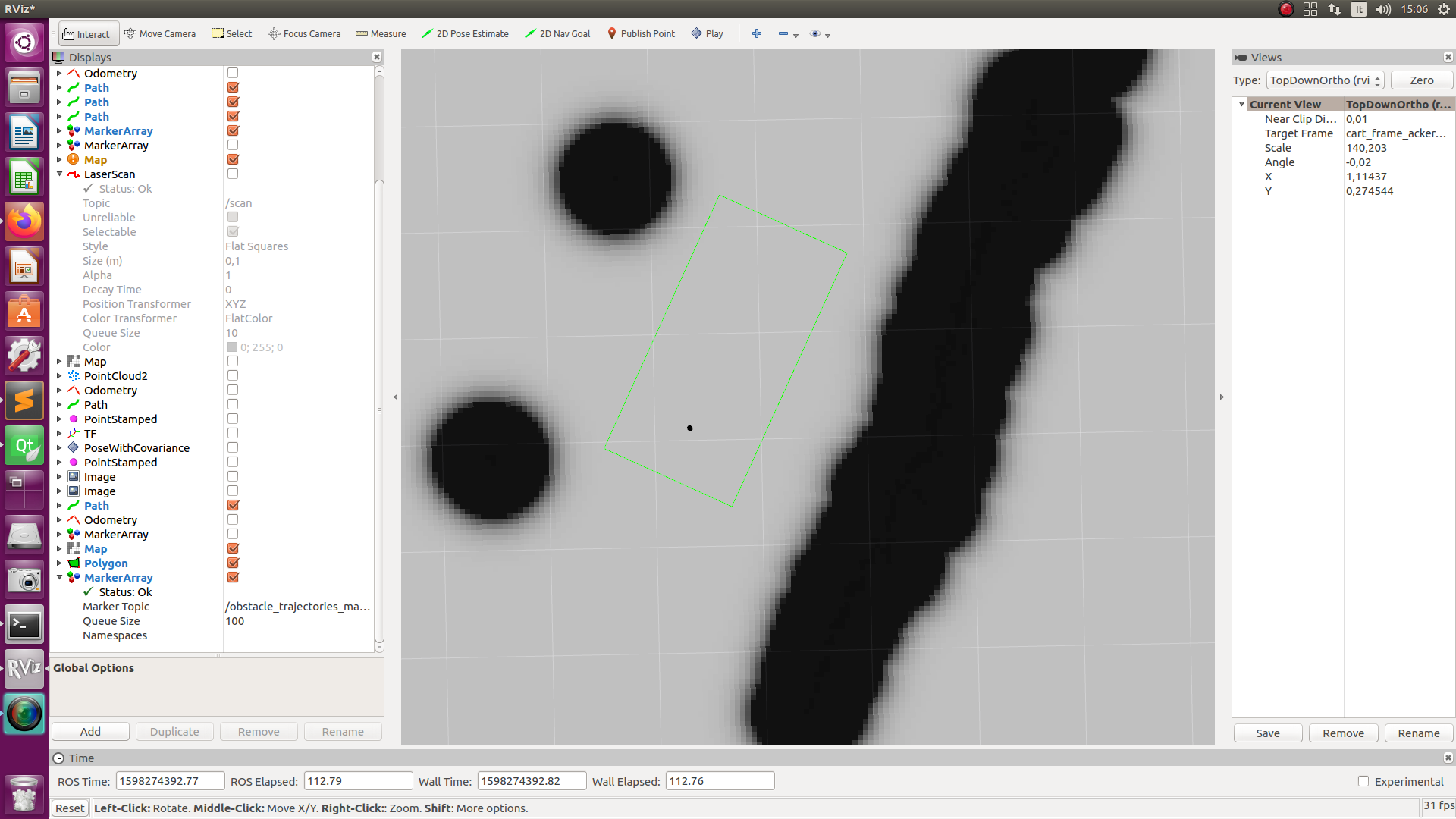
local costmap point of lethal obstacle in the center of robot frame
Hi, Some time i have in the local costmap one point of lethal obstacle in the center of robot frame. Why?
In this way the local planner sees an obstacle and stops.

What do you mean by sometimes? Is it consistent with a behavior?