
Change Interactive Markers in MoveIt-generated package
I successfully created a simple working model of a robot with URDF using the MoveIt setup assistant (ROS Indigo). My model is visible in this image
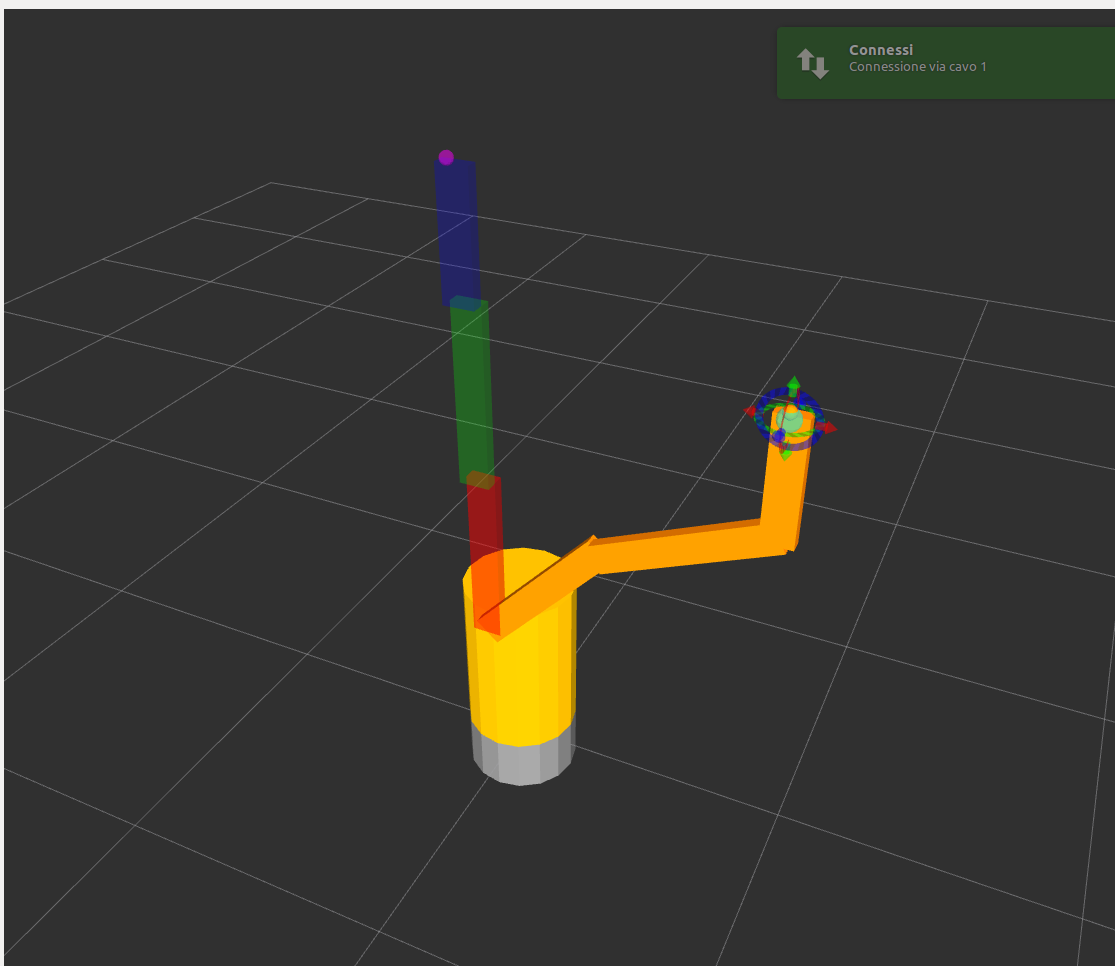
There are 3 boxes (red, blue, green) with their joints that can revolute, a fixed cylinder (grey) and another cylinder (yellow). In theory there is a joint that allow the yellow cylinder to spin around its vertical axis, rotating on the grey cylinder.
The problem is that I can grab only the end of the group (the purple ball is where the marker is set): the marker's arrows (blue and red) allow me to move the end of the robot but never involving the rotation of the yellow cylinder.
The problem is that my robot has less of 6 DOF? The problem is that the direction of displacement is always orthogonal to the rotation axis of the cylinder?
What about these (maybe wrong) ideas:
a) change the maker type like this one? How can I add it into MoveIt-geneated package? I read the gnerated files but I didn't found any lines about the marker generation.
b) split my robot in more groups? It will solve the problem? Will the planner work in the same way?
Thanks for any hints!
