
Motion planning for industrial robots
EDIT
Perhaps I should make the question even broader: I have a simple motion controller which needs to receive positions and velocities every 4ms (it's firmware is written in c++). I want to use ROS (currently using kinetic) to plan some trajectory (complicated or simple), and feed it to the motion controller. The problem I'm facing now is that the generated trajectory is not smooth and is not ready to be fed as is to the motion controller. Should I use other motion planning tools? or should I use tools to smoothen the trajectory?
More deatails:
I think I understand all of the tool-chain of ROS-I, but I'm missing the part of motion planning. I saw some questions about it, but most of them are pretty old.
The ROS-I tutorials show two ways (in general) for motion planning. One is using MoveIt! and the other is using descartes (which is still experimental?).
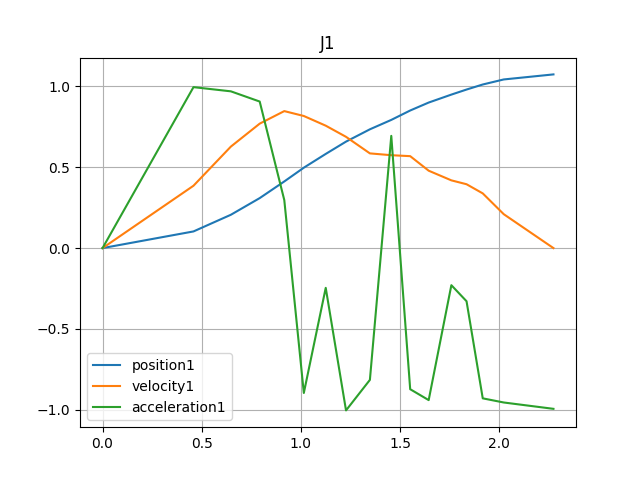
I've tried using MoveIt!, however, I need to interpolate the generated trajectories in constant time gaps and feed that to my controller (I do it in the robot driver - not with ROS). The trajectory that MoveIt! generates is pretty awful. The acceleration profile is really bad, and it affects the velocity and position. for example: image. Anyway, as I understand, MoveIt! is good for complicated motion planning tasks, for example obstacle avoidance, but the paths that it generates are not smooth.
This question talks about interpolating, does the given answer is still valid? Someone wrote there that using ROS Industrial Trajectory Filter is the solution, but after reading about it and looking at the code, I don't think it solves the problem.
What I'm looking for, is a motion planning tool that is more suitable for basic industrial robotics motion planning that generates smooth reliable paths. Is descartes the tool I'm looking for?
Last question: I saw there are Inverse-Kinematics solvers (such as KDL, trac_IK) . Are they just used by the motion planners? Or do these packages also allow to make motion planning?

{kind=link}
I saw this issue, and this issue I'm not sure if I fall to the same category and if this is fixed already