
static map and costmap unmatch
Hello,
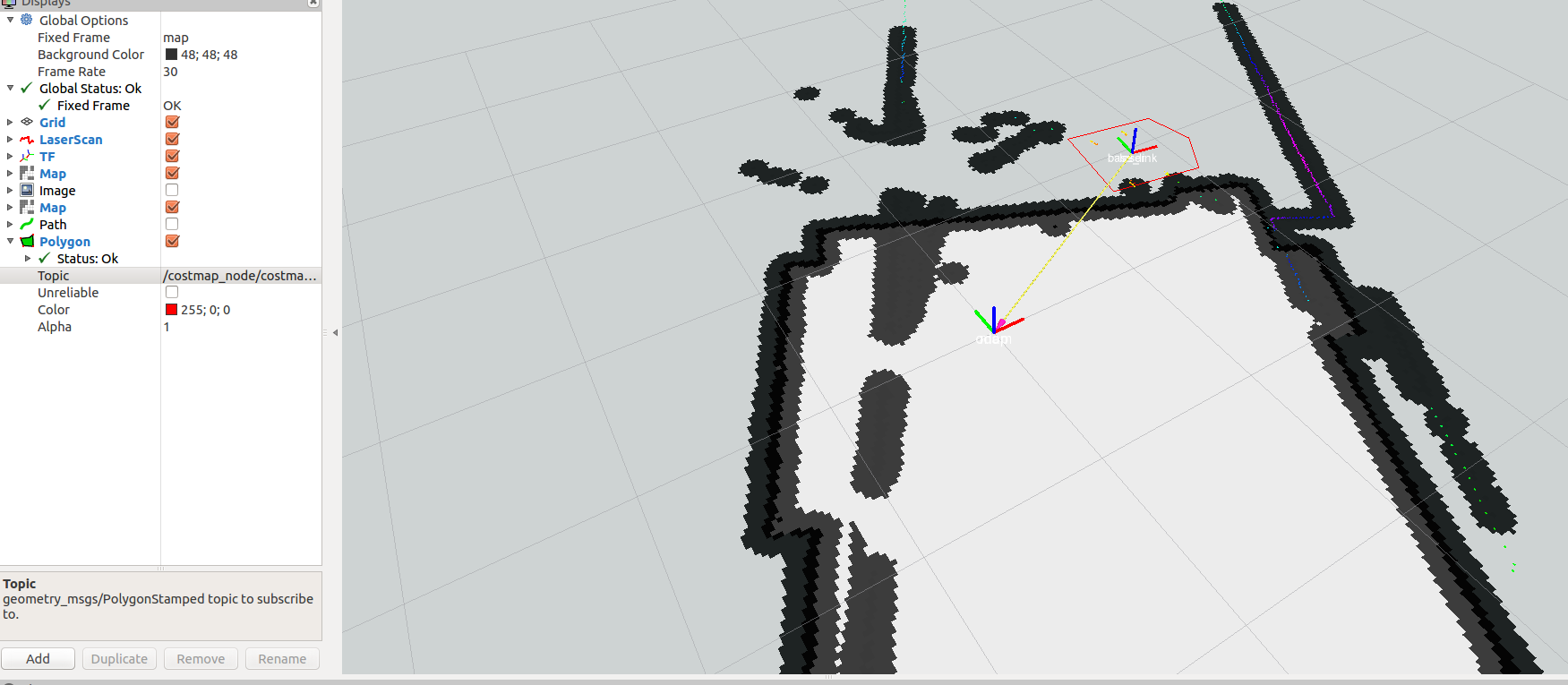
for showing obstacles in the map with only laser scanner i'm trying to do costmap_2d. i created static map with hector_slam. then use costmap...
when i run my costmap launch, In rviz, static map and costmap wasn't match with each other, besides footprint was in the outside of the static map...how can i fix this problem?
add a comment
