
Turtlebot doesn't go to desired goal!!
 Hi Everyone,
I appreciate it very much if someone can explain me the problem here.
Hi Everyone,
I appreciate it very much if someone can explain me the problem here.
I am using Turtlebot 2 with Kinect sensor for autonomous navigation. I follow the Turtlebot tutorial for this purpose. I have create a map here using rosbag record with linear_update value of 0.1 as the map was skewed in higher value.
Now then I load the map using map_server and launch turtlebot amcl. The robot can sucessfully navigate to some goal point such as in the straight path, but when the goal point is inside the room, it goes up to the door and stopped suddenly. In some case, the robot even doesn't move from its current position. In amcl, I recieve something like this;
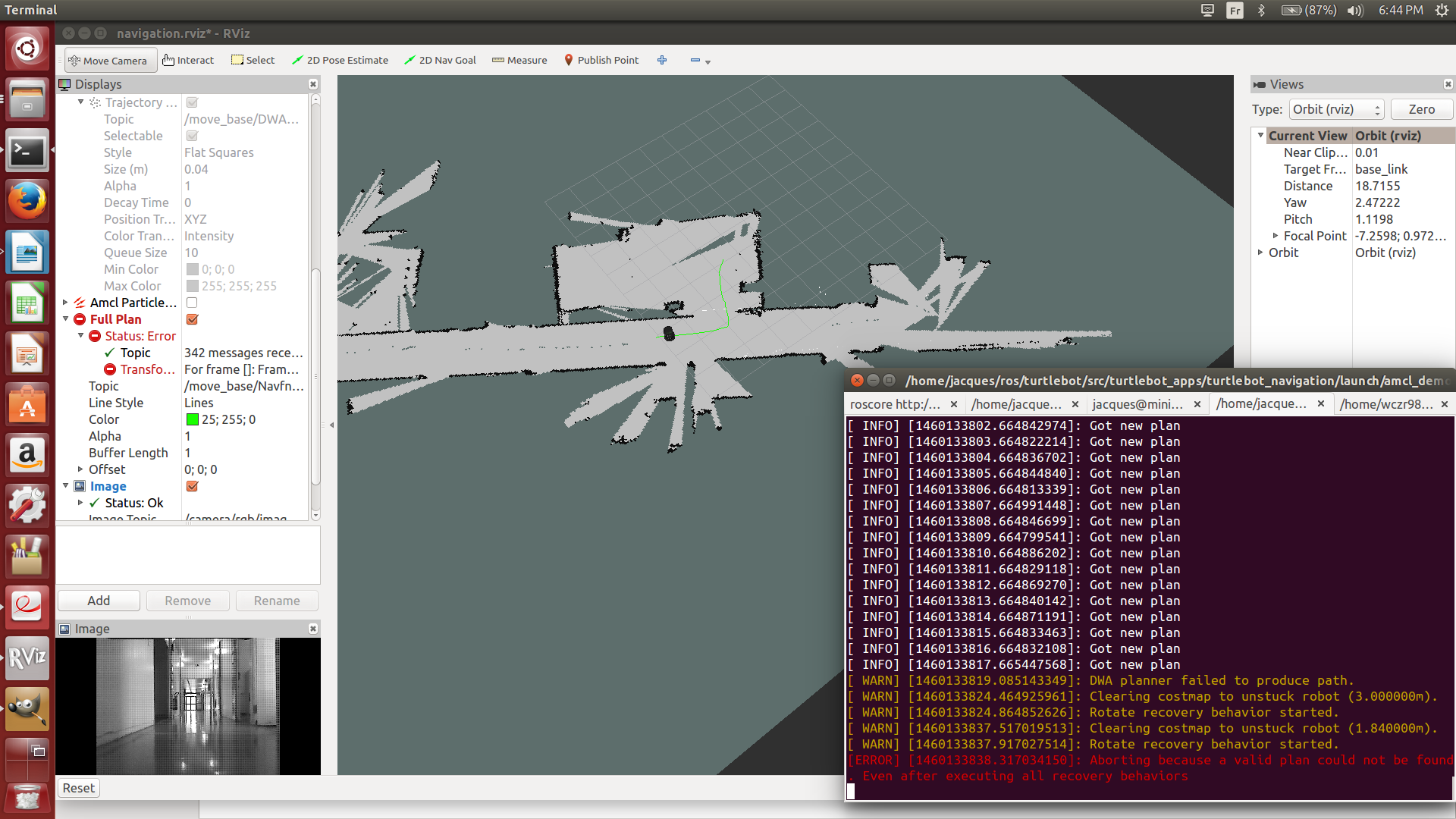
DWA planner failed to produce path. [ WARN] [1460044692.767036876]: Clearing costmap to unstuck robot (3.000000m). [ WARN] [1460044693.167373773]: Rotate recovery behavior started. [ WARN] [1460044693.566868655]: Clearing costmap to unstuck robot (1.840000m). [ WARN] [1460044693.966807677]: Rotate recovery behavior started. [ERROR] [1460044694.366874644]: Aborting because a valid plan could not be found. Even after executing all recovery behaviors
I don't know much about the ROS, still learning. Is it because of the value of linear update?Do I need to adjust the parameters in move_base? Please give me some idea on this.
Thanks in advance for your consideration.

Can you post a screens shot of local costmap at the moment robot stops and gives "DWA planner failed to produce path"?
Hi DavidN , thanks for the response. I attached the screenshot when robot stops. And one more thing, when the robot hit the obstacles, it keep hitting untill it finally stop instead of avoiding it!