
What does the Fixed Frame mean in rviz?
What does the Fixed Frame mean in rviz?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
What does the Fixed Frame mean in rviz?
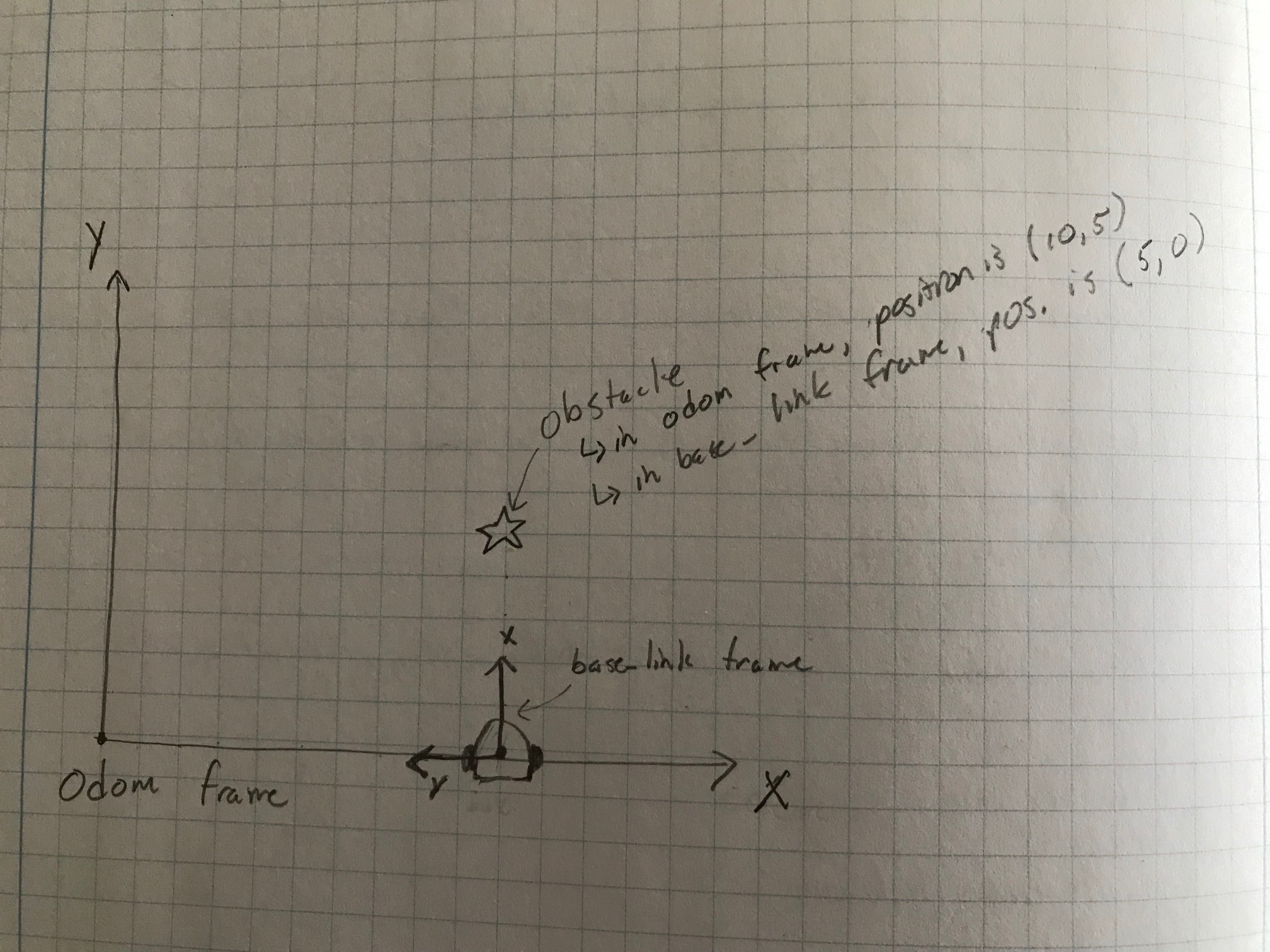
It's the tf frame that all positions/measurements that you see are relative to. For example, let's say you have a robot that has two frames, odom (a world-fixed frame) and base_link (the body frame of the robot). The robot is at position (10, 0) with a heading of pi/2 in the odom frame, and it has a LIDAR on board that sees an obstacle 5 meters directly in front of it. If you set your Fixed Frame to odom, that obstacle will appear at position (10, 5). If you set your Fixed Frame to base_link, it will appear at (5, 0).
EDIT: updating answer for comment from @malharjajoo
Thank you so much.
Does the Grid always be the world coordinate? If I set /odom as the fixed frame. Rviz will draw obstacle at potions (10, 5) in the Grid?
I think the heading in your assumption should be pi/2.
@tom, I didn;t really follow your explanation, what does heading = pi/2 mean ( is the robot facing left by 90 degree compared to lidar) ?
also could you elaborate how the (10,0) and (10,5) works out ? can't seem to visualize that based on the explanation.
Asked: 2014-11-19 06:59:24 -0500
Seen: 7,048 times
Last updated: Feb 19 '18
Sensor smearing for Husky, problem with localizing?
Slow RVIZ when displaying point cloud
Contoller Spawner and transform problem in RViz
Displaying trajectories on rviz
Autoware Mission Planning, Client has wrong datatype version: datatype/md5sum
Frames are moving away from global frame
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
