
about resolution on yaml

My question:
As hokuyo laser URG-04LX has 1mm resolution, I should set 0.001 as resolution on global_costmap_params.yaml?
Because the resolution of hokuyo laser URG-04LX is 1mm. or Should I edit this parameter to match unit [m/pixel] in case that pgm has 312X512 pixels and actual map size has 2.7m wide and 5.3m height?
Could anybody tell me your experience?
Next article says more detailed information.
I have a laser3.yaml and laser3.pgm like this.
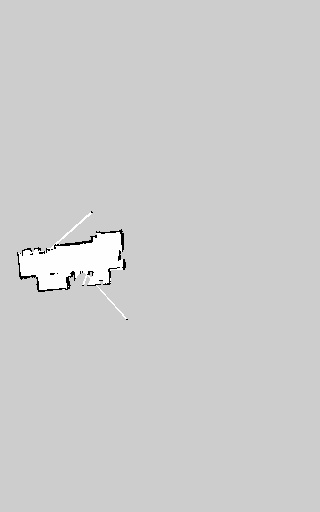
laser3.png
laser3.yaml
image: /home/turtlebot/laser3.pgm resolution: 0.050000 origin: [-1.000000, -12.200000, 0.000000] negate: 0 occupied_thresh: 0.65 free_thresh: 0.196
So, I'm editing my code like this.
map_upperboud = costmap_->getSizeInMetersX() -costmap_->getOriginX();
map_lowerbound = costmap_->getOriginX();
ROS_WARN("Setting upper bound and lower bound of map x-coordinate to (%f, %f).", map_upperbound, map_lowerbound);
When I execute this program, I get a next message.
[ WARN] [1404074825.515283246]: Setting upper bound and lower bound of map x-coordinate to (16.975000, -1.000000).
[ WARN] [1404074825.515418641]: Setting upper bound and lower bound of map y-coordinate to (37.775000, -12.200000).
I think getOriginX() reads laser3.yaml.
Actually, The map have 2.7m in X-axis and 5.3m in Y-axis. But, The result has 16.95 in X-axis and 37.775 in Y-axis.
laser3.png that actually is laser3.pgm has 320X512 pixels.
If calculating pixels, origin data and resolution in yaml with getSizeInMetersX(), I get 16.975 and 37.775.
So, resolution of parameter is written on laser3.yaml after reading a resolution in global_costmap_params.yaml.


{kind=link}
I think I should set 0.01[m/pixel] as a resolution, if I follow the map that has 312X512 pixels.