The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| | 1 | initial version |
MoveIt behaves differently when planning by using the RViz plugin versus sending commands to the Move Group (in a scenario where you are using motion planning in the robot logic as opposed to validating/troubleshooting your model).
While motion planning requests to the real API let you configure goal tolerances, RViz did not let you do it when using the MoveIt plugin with fake controllers. I added this feature with Read Goal Tolerances from Kinematics Configuration pull request.
Now you can:
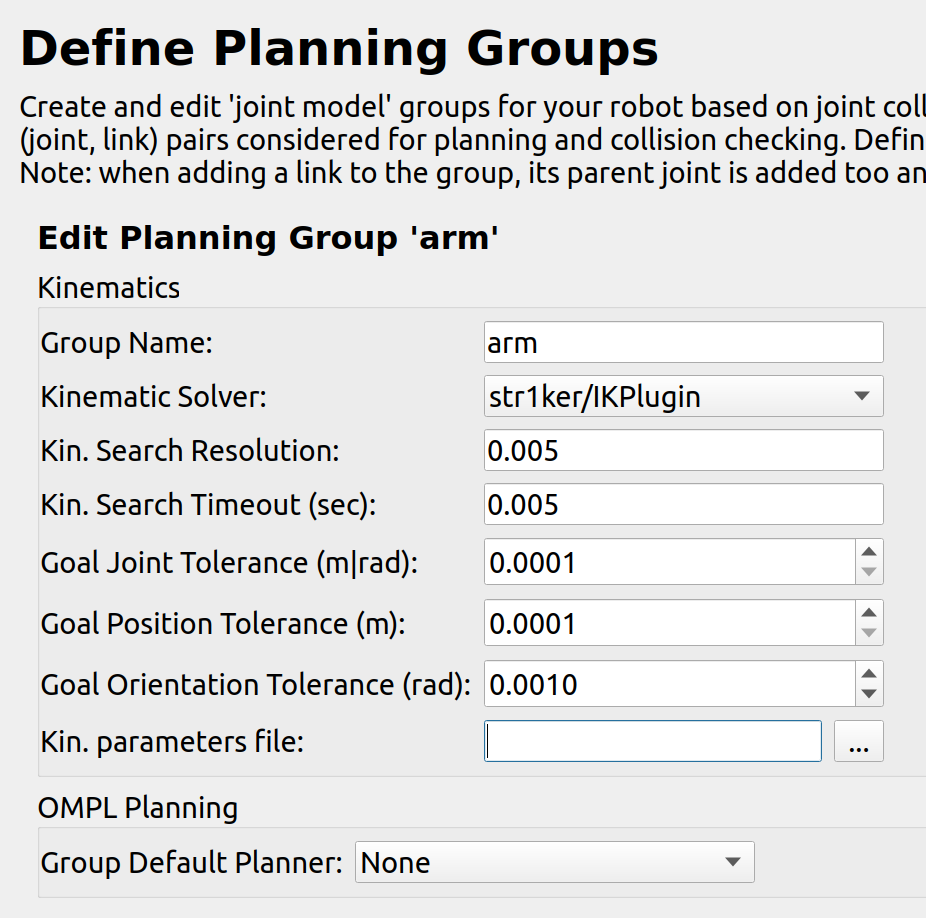
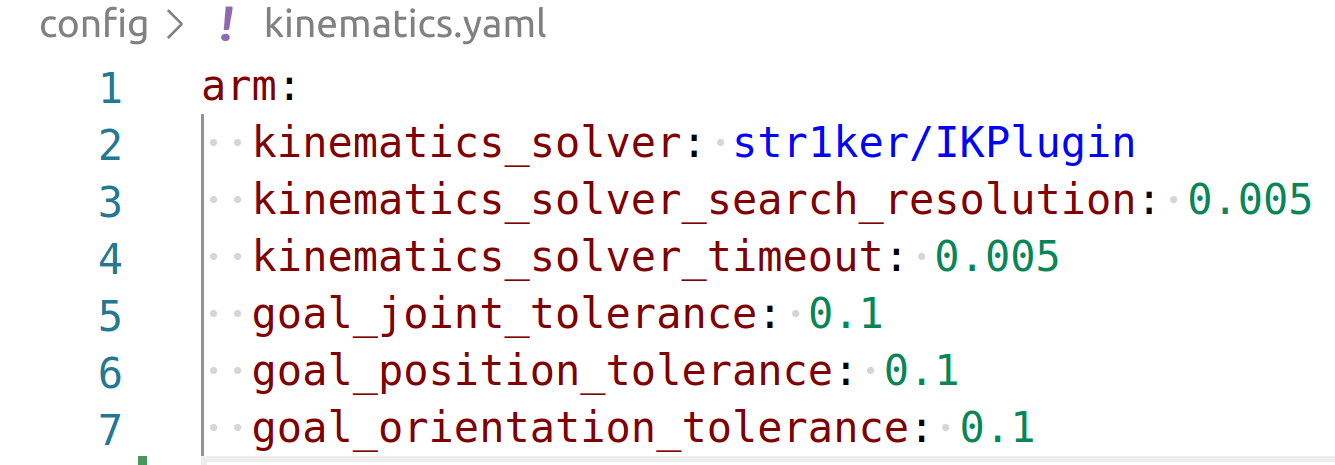
It should work when creating a new MoveIt config or editing an existing MoveIt config, and any values you entered manually by editing the .yaml file should be picked by up MoveIt Setup Assistant and carried forward.
| | 2 | No.2 Revision |
MoveIt behaves differently when planning by using the RViz plugin versus sending commands to the Move Group (in a scenario where you are topic (or using motion planning in the robot logic as opposed to validating/troubleshooting your model).Move Group directly through C++ API).
While motion planning requests to the real API let you configure goal tolerances, RViz did not let you do it when using the MoveIt plugin with fake controllers. I added this feature with Read Goal Tolerances from Kinematics Configuration pull request.
Now you can:
It should work when creating a new MoveIt config or editing an existing MoveIt config, and any values you entered manually by editing the .yaml file should be picked by up MoveIt Setup Assistant and carried forward.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.