The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| | 1 | initial version |
You can use this site to check if your URDF is defined correctlr, e.g. default example with R2D2:
http://www.mymodelrobot.appspot.com/5629499534213120
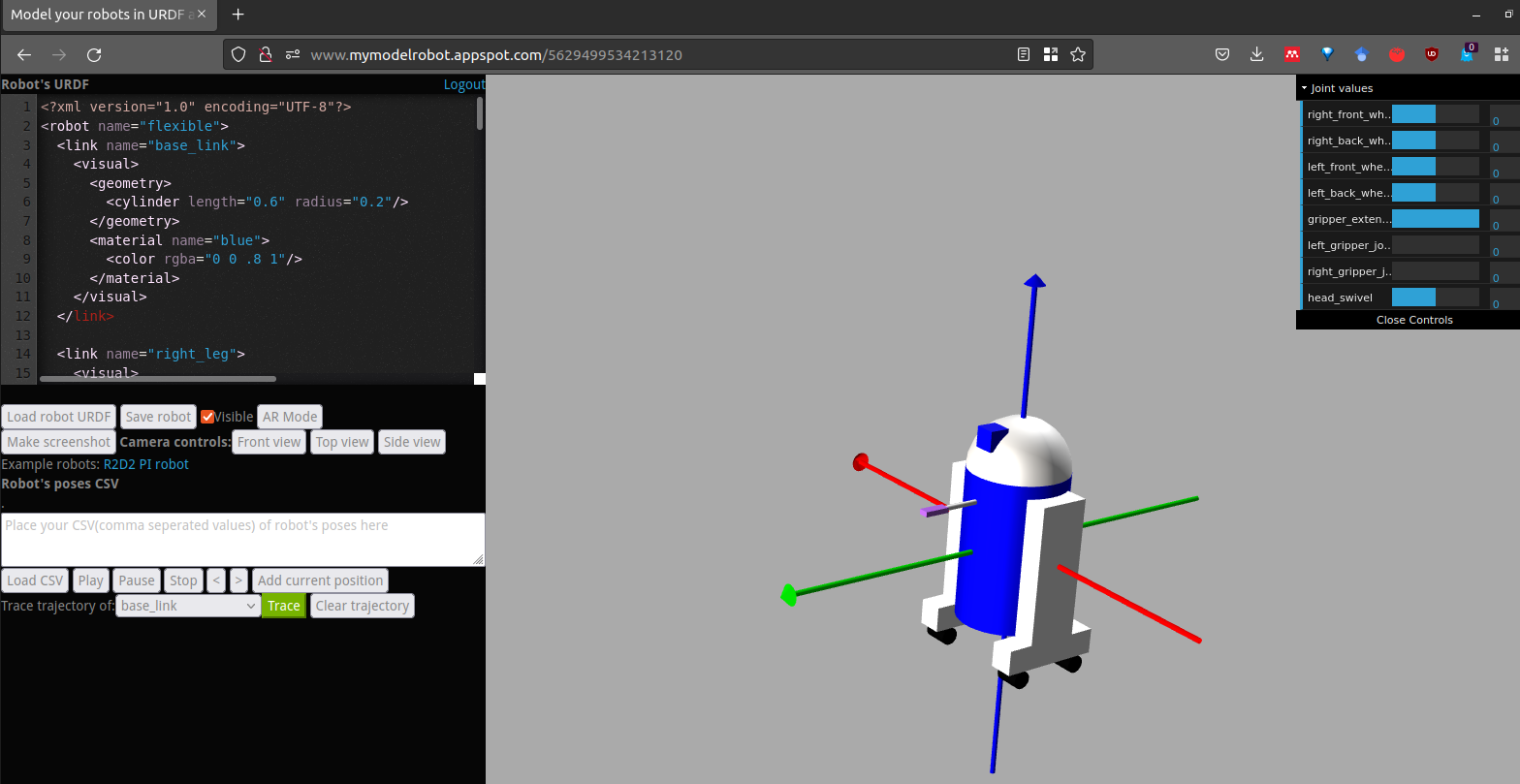
Your URDF seems to not working correctly there too - the screen after loading the URDF is blank...
There is a slider for j_br_wheel only, without any parts.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
