
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
It could be there is a mistake in the provided _macro.xacros, but it would be good to get some more info.
One thing to keep in mind: the _macro.xacro models the ideal or nominal robot. If yours is (kinematically) calibrated and you haven't updated the xacro, the robot_state_publisher will not know about this and FK will not result in the same values as the robot reports.
| | 2 | No.2 Revision |
It could be there is a mistake in the provided _macro.xacros, but it would be good to get some more info.
One thing to keep in mind: the _macro.xacro models the ideal or nominal robot. If yours is (kinematically) calibrated and you haven't updated the xacro, the robot_state_publisher will not know about this and FK will not result in the same values as the robot reports.
Edit:
As long as the fang is parallel to the floor [..]
off-topic, but: that sounds like a dangerous robot ;)
| | 3 | No.3 Revision |
It could be there is a mistake in the provided _macro.xacros, but it would be good to get some more info.
One thing to keep in mind: the _macro.xacro models the ideal or nominal robot. If yours is (kinematically) calibrated and you haven't updated the xacro, the robot_state_publisher will not know about this and FK will not result in the same values as the robot reports.
Edit:
As long as the fang is parallel to the floor [..]
off-topic, but: that sounds like a dangerous robot ;)
Edit 2:
I have the KUKA kr10r1100-2. May this 2 at the end has a meaning related to this difference?
yes, I believe that's the cause of what you see.
From the online datasheet of the KR10 R1100 sixx (here):
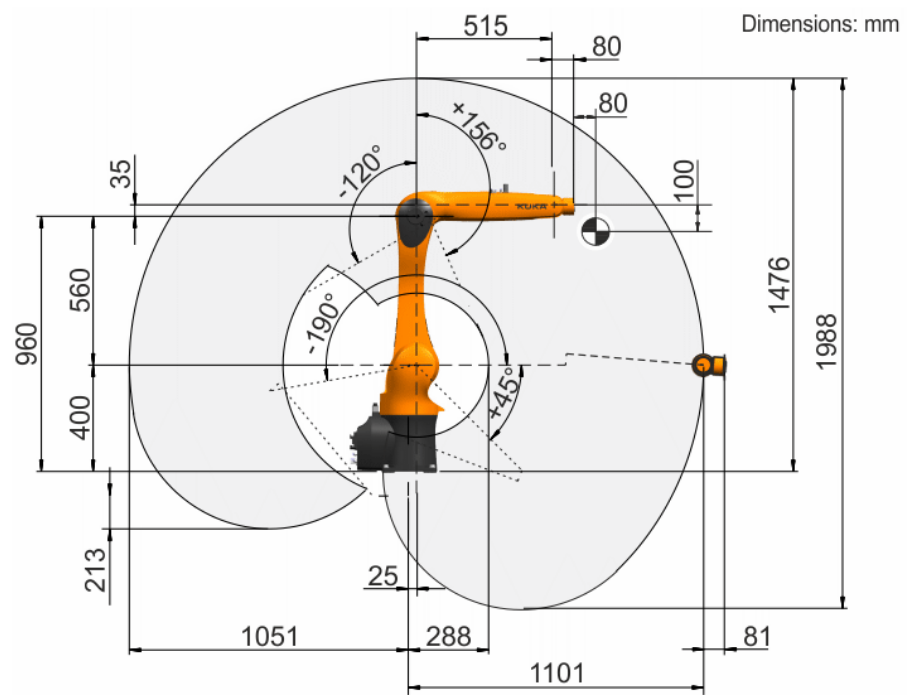
Notice the translation in Z for joint_4 is 0.35, and the translation in X for joint_6 is 0.80, as they are in the _macro.xacro.
It would appear the -2 has some links with slightly different lengths.
This would require adding support for the -2 variant to the kuka_kr10_support package. Would you be willing to contribute that?
| | 4 | No.4 Revision |
It could be there is a mistake in the provided _macro.xacros, but it would be good to get some more info.
One thing to keep in mind: the _macro.xacro models the ideal or nominal robot. If yours is (kinematically) calibrated and you haven't updated the xacro, the robot_state_publisher will not know about this and FK will not result in the same values as the robot reports.
Edit:
As long as the fang is parallel to the floor [..]
off-topic, but: that sounds like a dangerous robot ;)
Edit 2:
I have the KUKA kr10r1100-2. May this 2 at the end has a meaning related to this difference?
yes, I believe that's the cause of what you see.
From the online datasheet of the KR10 R1100 sixx (0000210360_EN.pdf, here):
Notice the translation in Z for joint_4 is 0.35, and the translation in X for joint_6 is 0.80, as they are in the _macro.xacro.
It would appear the -2 has some links with slightly different lengths.
This would require adding support for the -2 variant to the kuka_kr10_support package. Would you be willing to contribute that?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.