
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi Dong_ym,
I think that the reason why you cannot see in the /scan_multi the obstacles of the back is because you are using the default configuration of the ira_laser_tool. By default, the ira_laser_toolpackage does not produce the /scan_multi from -PI to +PI, but some other weird values.
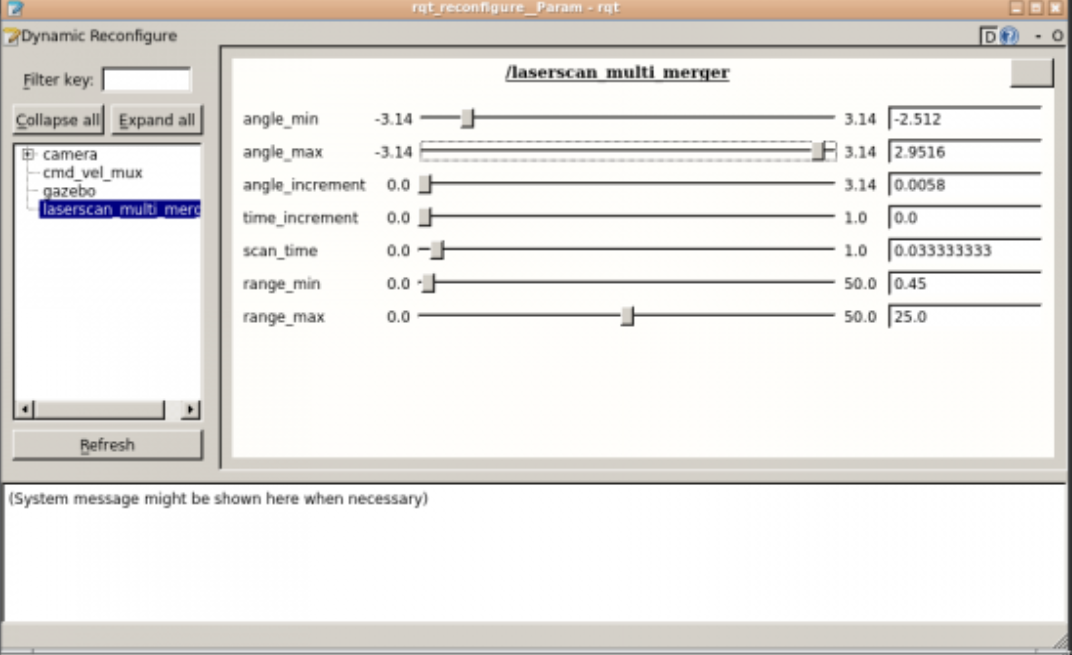
The solution, is to use the rqt_reconfigure tool to set the angle_min and angle_max parameters to -PI and +PI respectively. To do that, open the tool with the command:
rosrun rqt_reconfigure rqt_reconfigure
You should see something like in the picture attached. Then, just change the angle values. I recommend you change that while watching the scan in rviz so you will see clearly how the scan changes based on your values.
I have created, too, a video showing how I did that for a Turtlebot with two lasers. Find the video here.
Hope it helps.
| | 2 | No.2 Revision |
Hi Dong_ym,
I think that the reason why you cannot see in the /scan_multi the obstacles of the back is because you are using the default configuration of the ira_laser_tool. By default, the ira_laser_toolpackage does not produce the /scan_multi from -PI to +PI, but some other weird values.
The solution, is to use the rqt_reconfigure tool to set the angle_min and angle_max parameters to -PI and +PI respectively. To do that, open the tool with the command:
rosrun rqt_reconfigure rqt_reconfigure
You should see something like in the picture attached. Then, just change the angle values. I recommend you change that while watching the scan in rviz so you will see clearly how the scan changes based on your values.
I have created, too, a video showing how I did that for a Turtlebot with two lasers. Find the video here.
Hope it helps.
| | 3 | No.3 Revision |
Hi Dong_ym,
I think that the reason why you cannot see in the /scan_multi the obstacles of the back is because you are using the default configuration of the ira_laser_tool. By default, the ira_laser_toolpackage does not produce the /scan_multi from -PI to +PI, but some other weird values.
The solution, is to use the rqt_reconfigure tool to set the angle_min and angle_max parameters to -PI and +PI respectively. To do that, open the tool with the command:
rosrun rqt_reconfigure rqt_reconfigure
You should see something like in the picture attached. Then, just change the angle values. I recommend you change that while watching the scan in rviz so you will see clearly how the scan changes based on your values.
I have created, too, a video showing how I did that for a Turtlebot with two lasers. Find the video here.
Hope it helps.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.