
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
You didn't follow the moveit setup assistant tutorial properly.You have defined links for the "arms" group in setup assistant ,but you didn't define the joints for the same group. That is the reason your srdf doesn't have any joints defined in the arms group. Then you should define the kinematic solver for arms group by double clicking the name of the group in planning group dialog.
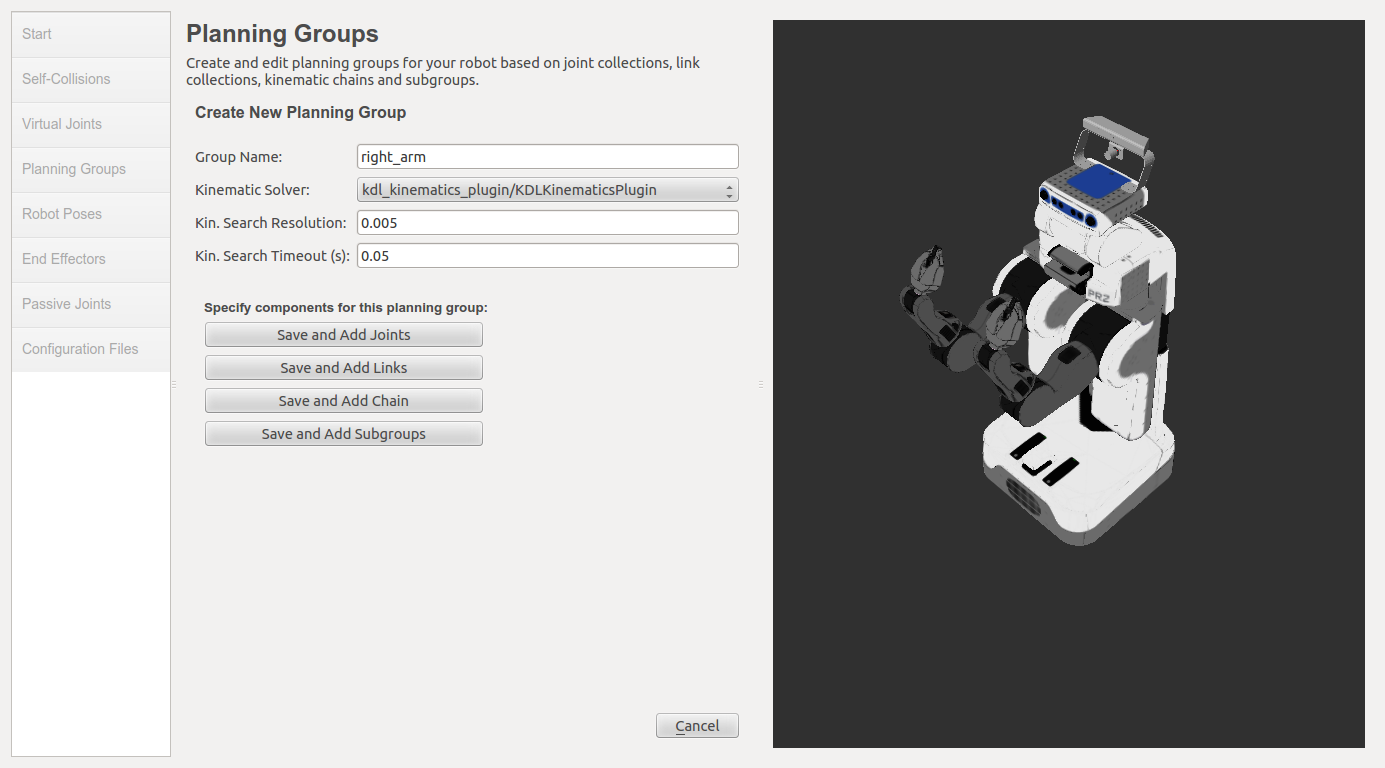
Next create a seperate group for your tool joint and define the kinematic solver as none for this. Then make this group as the end effector group and the parent group of the end effector as arms group. This will resolve this warning
No active joints or end effectors found for group 'arms'. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
After fixing this, run demo.launch and you can see the interactive markers. For additional information, follow the steps in this Moveit tutorial .
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
