
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
like dornhege said, it work for me to name remap the driver, the topics from each cam:
1.
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >="" ...="" <node="" name="usb_cam2" pkg="usb_cam" type="usb_cam_node" output="screen" >="" ...="" 2.="" <arg="" name="cam_image_topic" default="/usb_cam/image_raw"/>
<arg name="cam_info_topic" default="/usb_cam/camera_info"/>
<arg name="output_frame" default="/usb_cam"/>
<arg name="cam_image_topic2" default="/usb_cam2/image_raw"/>
<arg name="cam_info_topic2" default="/usb_cam2/camera_info"/>
<arg name="output_frame2" default="/usb_cam2"/>
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen" args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)" />
<node name="ar_track_alvar2" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="true" output="screen" args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic2) $(arg cam_info_topic2) $(arg output_frame2)"/> ... But if the cameras detect the same Tag, the pose estamation jump from one camera to the other. Is it possible to get the old packge ar_pose_ekf somewhere? Or have someone a good idea to merge the estimations without long coding?
| | 2 | No.2 Revision |
like dornhege said, it work for me to name remap the driver, the topics from each cam:
1.
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >="" ...="" <node="" name="usb_cam2" pkg="usb_cam" type="usb_cam_node" output="screen" >="" ...="" 2.="" <arg="" name="cam_image_topic" default="/usb_cam/image_raw"/>
<arg name="cam_info_topic" default="/usb_cam/camera_info"/>
<arg name="output_frame" default="/usb_cam"/>
<arg name="cam_image_topic2" default="/usb_cam2/image_raw"/>
<arg name="cam_info_topic2" default="/usb_cam2/camera_info"/>
<arg name="output_frame2" default="/usb_cam2"/>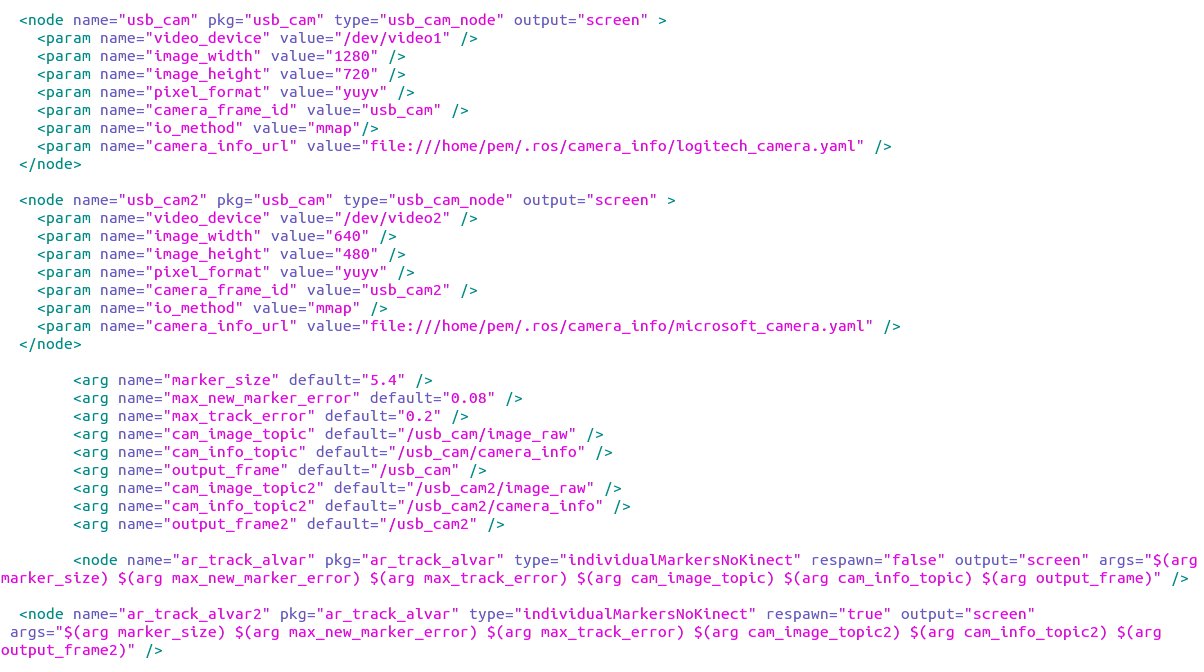
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen" args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)" />
<node name="ar_track_alvar2" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="true" output="screen" args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic2) $(arg cam_info_topic2) $(arg output_frame2)"/>
...
But if the cameras detect the same Tag, the pose estamation jump from one camera to the other. Is it possible to get the old packge ar_pose_ekf somewhere? Or have someone a good idea to merge the estimations without long coding?
| | 3 | No.3 Revision |
like dornhege said, it work for me to name remap the driver, the topics from each cam:
But if the cameras detect the same Tag, the pose estamation jump from one camera to the other. Is it possible to get the old packge ar_pose_ekf somewhere? Or have someone a good idea to merge the estimations without long coding?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.