The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-10 10:20:59 -0500 | received badge | ● Famous Question (source) |
| 2022-06-29 02:58:50 -0500 | received badge | ● Notable Question (source) |
| 2022-05-31 04:30:10 -0500 | received badge | ● Famous Question (source) |
| 2022-04-12 07:15:00 -0500 | received badge | ● Notable Question (source) |
| 2022-02-06 19:15:00 -0500 | edited answer | How to attach OnRobot RG2 with UR10? This question is not solved but it seems like there has been some outdated drivers (which doesn't works well in noetic d |
| 2022-02-06 19:14:31 -0500 | received badge | ● Popular Question (source) |
| 2022-02-04 04:57:06 -0500 | received badge | ● Self-Learner (source) |
| 2022-02-04 02:10:28 -0500 | edited answer | How to attach OnRobot RG2 with UR10? This question is not solved but it seems like there has been some outdated drivers (which doesn't works well in noetic d |
| 2022-02-04 02:10:28 -0500 | received badge | ● Editor (source) |
| 2022-02-04 02:10:06 -0500 | answered a question | How to attach OnRobot RG2 with UR10? This question is not solved but it seems like there has been some outdated drivers (which doesn't works well in noetic d |
| 2022-02-01 09:21:33 -0500 | received badge | ● Popular Question (source) |
| 2022-01-27 03:27:28 -0500 | received badge | ● Self-Learner (source) |
| 2022-01-27 03:27:28 -0500 | received badge | ● Teacher (source) |
| 2022-01-27 03:26:24 -0500 | received badge | ● Popular Question (source) |
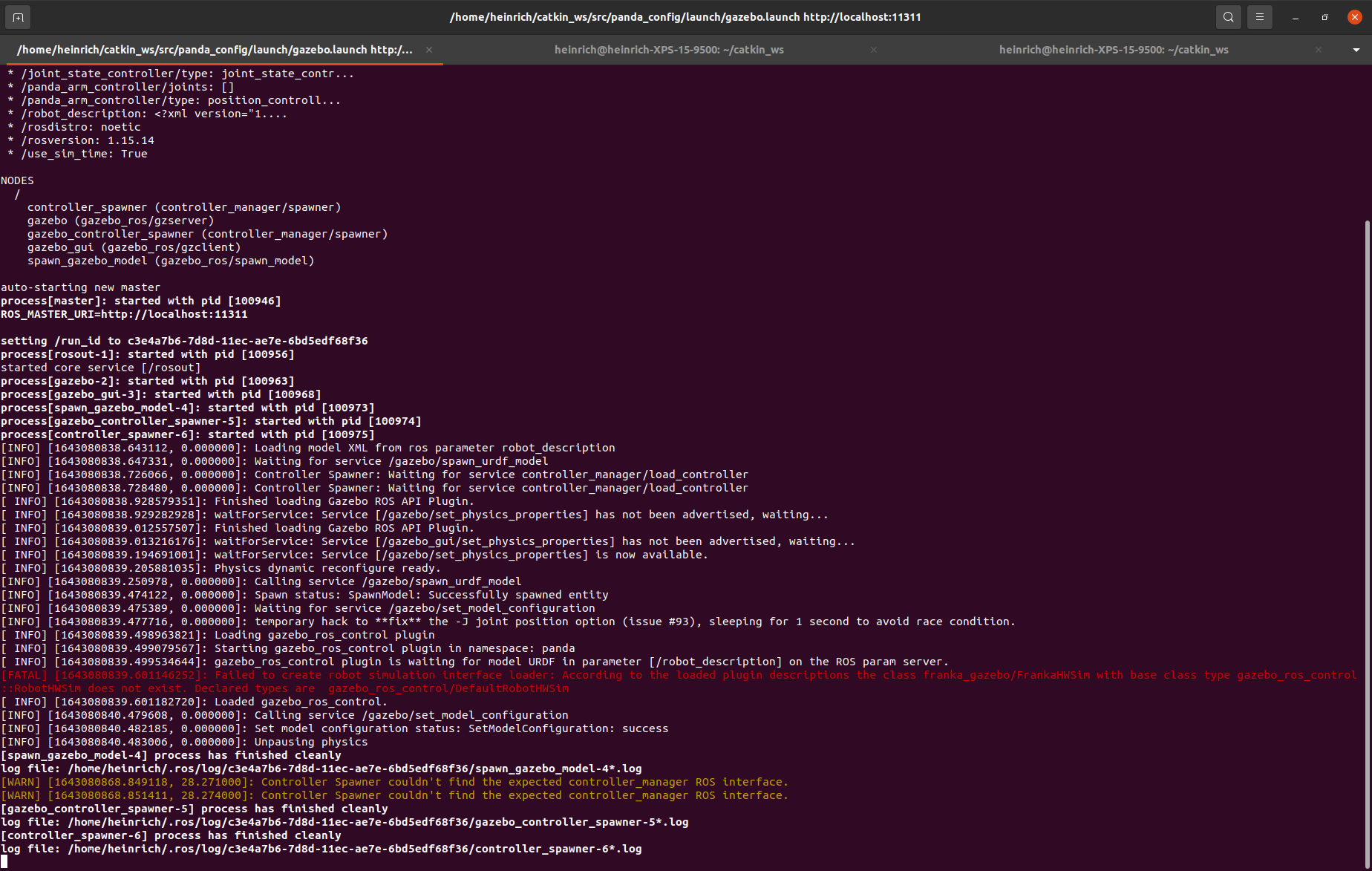
| 2022-01-27 02:59:29 -0500 | marked best answer | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? I am very new to ROS and all the tools surrounding ROS. Currently, I am trying to setup a franka emika (panda) robot arm using moveit setup assistant. After that, I just wanna launch the robot in the Gazebo simulation using the command
However, as you can see below, the robot collapse when spawned.
Here are some of the messages capture in the terminal (shown in the picture below):
I have gone through past questions on similar problems online, but it seems like the files generated from the setup assistant is a little different, hence I wasn't able to locate what are the mistakes. Below also I will attach the code for the robot urdf: panda_arm.urdf.xacro: |
| 2022-01-27 01:09:39 -0500 | edited question | How to attach OnRobot RG2 with UR10? How to attach OnRobot RG2 with UR10? I am new to ROS and I have been looking for ways to attach any OnRobot gripper to U |
| 2022-01-26 23:42:49 -0500 | answered a question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? I managed to solve this issue by following the tutorial from the attached websites: https://ros-planning.github.io/movei |
| 2022-01-26 23:41:32 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? Understand |
| 2022-01-26 02:54:13 -0500 | asked a question | How to attach OnRobot RG2 with UR10? How to attach OnRobot RG2 with UR10? I am new to ROS and I have been looking for ways to attach any OnRobot gripper to U |
| 2022-01-25 23:43:26 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? @osilva EDIT: I have followed the tutorial and manage to launch the gazebo and spawned a non-collapsed robot arm now. Ho |
| 2022-01-25 20:41:30 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? @osilva EDIT: I have followed the tutorial and manage to launch the gazebo and spawned a non-collapsed robot arm now. Ho |
| 2022-01-25 20:41:17 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? @osilva EDIT: I have followed the tutorial and manage to launch the gazebo and spawned a non-collapsed robot arm now. Ho |
| 2022-01-25 20:40:59 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? @osilva EDIT: I have followed the tutorial and manage to launch the gazebo and spawned a non-collapsed robot arm now. Ho |
| 2022-01-25 19:23:49 -0500 | commented question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? @osilva Regarding this matter, I found out that the files that are currently used in the tutorial are different from the |
| 2022-01-25 00:17:41 -0500 | received badge | ● Enthusiast |
| 2022-01-24 21:33:10 -0500 | asked a question | Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? Why is my robotic arm laying down in Gazebo after configure it with MoveIt Setup Assistant? I am very new to ROS and all |
| 2022-01-22 07:57:45 -0500 | commented question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? @abhishek47 I am sorry to confuse you. So, I realize that moveit setup assistant are capable of generating the initial s |
| 2022-01-22 06:03:34 -0500 | commented question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? @abhishek47 the code of the plans... without having to use the API.. |
| 2022-01-22 02:49:16 -0500 | commented question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? @abhishek47 "generate code" meaning from the rviz visualization of the plan, we were able to get the code as well |
| 2022-01-21 09:38:55 -0500 | received badge | ● Student (source) |
| 2022-01-21 09:32:54 -0500 | asked a question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? I am new to ROS and m |
| 2022-01-21 09:32:54 -0500 | asked a question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? I am new to ROS and m |
| 2022-01-21 09:32:54 -0500 | asked a question | Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? Is there a way for ROS developers to use MoveIt Motion Planning and generate the code of the plan? I am new to ROS and m |
| 2022-01-21 09:32:54 -0500 | asked a question | Is it possible to simulate a pick and place simulation using moveit (Motion Planning) and generate the code of the simulation Is it possible to simulate a pick and place simulation using moveit (Motion Planning) and generate the code of the simul |
| 2022-01-20 21:50:42 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.