The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2024-03-02 08:49:12 -0500 | received badge | ● Famous Question (source) |
| 2023-02-01 00:36:43 -0500 | received badge | ● Famous Question (source) |
| 2022-11-11 01:32:59 -0500 | received badge | ● Famous Question (source) |
| 2022-11-11 01:32:59 -0500 | received badge | ● Notable Question (source) |
| 2022-10-13 20:29:35 -0500 | received badge | ● Nice Question (source) |
| 2022-09-22 07:53:07 -0500 | received badge | ● Famous Question (source) |
| 2022-07-01 08:40:27 -0500 | received badge | ● Notable Question (source) |
| 2022-06-06 10:33:16 -0500 | received badge | ● Notable Question (source) |
| 2022-05-23 20:13:22 -0500 | received badge | ● Famous Question (source) |
| 2022-05-04 00:09:53 -0500 | received badge | ● Nice Answer (source) |
| 2022-04-20 08:08:10 -0500 | received badge | ● Famous Question (source) |
| 2022-04-15 01:15:11 -0500 | received badge | ● Student (source) |
| 2022-04-15 01:15:05 -0500 | received badge | ● Self-Learner (source) |
| 2022-04-14 11:50:54 -0500 | edited answer | Rviz slows down publisher when subscribed to /map topic? Ok, the reason was pretty obvious. The publisher is located on one machine, and the subscriber (Rviz or Plotjugger or an |
| 2022-04-14 11:50:11 -0500 | marked best answer | Rviz slows down publisher when subscribed to /map topic? Ubuntu 20.04 ROS2 Foxy C++ Why would Rviz slow down the program running /map publisher when subscribed to the topic? The following error pops up. The map is displayed but getting updated agonizingly slow. Update: Bandwidth of the /map publisher drops from 600KB/s to 50KB/s Frequency drops from 7Hz to 0.4Hz. BTW it's not only Rviz, with plotjuggler program I see the same slowdown. |
| 2022-04-14 11:49:58 -0500 | answered a question | Rviz slows down publisher when subscribed to /map topic? Ok, the reason was pretty obvious. The publisher is located on one machine, and the subscriber (Rviz or Plotjugger or an |
| 2022-04-12 10:54:26 -0500 | received badge | ● Popular Question (source) |
| 2022-04-12 10:54:15 -0500 | received badge | ● Notable Question (source) |
| 2022-04-10 14:59:44 -0500 | received badge | ● Notable Question (source) |
| 2022-04-07 12:16:53 -0500 | edited question | Rviz slows down publisher when subscribed to /map topic? Rviz slows down publisher when subscribed to /map topic? Ubuntu 20.04 ROS2 Foxy C++ Why would Rviz slow down the progra |
| 2022-04-07 10:41:56 -0500 | received badge | ● Popular Question (source) |
| 2022-04-07 09:56:00 -0500 | edited question | Rviz slows down publisher when subscribed to /map topic? Rviz slows down publisher when subscribed to /map topic? Ubuntu 20.04 ROS2 Foxy C++ Why would Rviz slow down the progra |
| 2022-04-07 09:53:14 -0500 | edited question | Rviz slows down publisher when subscribed to /map topic? Rviz error for /map topic: Vertex Program... Ubuntu 20.04 ROS2 Foxy C++ Please advise what's the following error is abo |
| 2022-04-06 15:38:42 -0500 | edited question | Rviz slows down publisher when subscribed to /map topic? Rviz error for /map topic: Vertex Program... Ubuntu 20.04 ROS2 Foxy C++ Please advise what's the following error is abo |
| 2022-04-06 11:44:53 -0500 | asked a question | Rviz slows down publisher when subscribed to /map topic? Rviz error for /map topic: Vertex Program... Ubuntu 20.04 ROS2 Foxy C++ Please advise what's the following error is abo |
| 2022-04-06 02:02:45 -0500 | received badge | ● Notable Question (source) |
| 2022-04-04 07:45:14 -0500 | received badge | ● Popular Question (source) |
| 2022-03-31 12:24:48 -0500 | edited question | PointCloud2 parse to xyz array in ROS2 PointCloud2 to xyz array in ROS2 I'm trying to find a solution of converting PointCloud2 message data into xyz array for |
| 2022-03-31 11:24:46 -0500 | asked a question | PointCloud2 parse to xyz array in ROS2 PointCloud2 to xyz array in ROS2 I'm trying to find a solution of converting PointCloud2 message data into xyz array for |
| 2022-03-29 18:27:31 -0500 | received badge | ● Popular Question (source) |
| 2022-03-28 09:47:54 -0500 | edited question | slam_toolbox life-long mapping issue slam_toolbox life-long mapping doesn't work I've tested slam_toolbox producing life-long environment mapping, and not qu |
| 2022-03-28 09:19:45 -0500 | asked a question | slam_toolbox life-long mapping issue slam_toolbox life-long mapping doesn't work I've tested slam_toolbox producing life-long environment mapping, and not qu |
| 2022-03-27 01:19:33 -0500 | marked best answer | slam_toolbox incomplete mapping Installed slam_toolbox on Foxy, Ubuntu 20.04: Set up the yaml like: Run Provided transforms: odom -> base_link - dynamic from odom node (or static for testing - the same result) base_link -> laser - static I see the /map topic in Rviz.
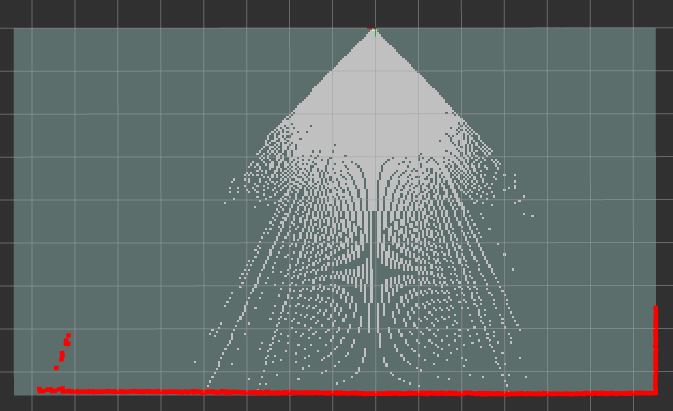
Rviz has an error but still show the map: The messages from slam_toolbox node: Why do I have this weird looking map? With the same input I'm getting a perfect map with gmapping slam. It's not only Rviz issue BTW. I'm really getting occupancy grid 2D array with this layout. It appears like the mapping looks good in the area close to the scanner. Could it be that it's the maximum distance issue? My scanner is long range laser and the grid on the pic is 1m. |
| 2022-03-25 15:36:13 -0500 | marked best answer | slam_gmapping Message Filter dropping message with dynamic trasform I'm using a fork of slam_gmapping package for ROS2: https://github.com/Project-MANAS/slam... As we all know, it requires the odometry tf transformation. Specifically, it requires the following transforms: As an output SLAM provides I was able to make it working with static transformations. So, I provided cloud => base_link and base_link => odom transforms and everything worked just fine. This is situation when my laser is static/no motion. The following step was going to be pretty simple, but turned out to be not easy as I expected. If my laser is moving, then the solution to it is to leave the cloud => base_link as a static transform, and to add a dynamic transform base_link => odom, initiated either with the wall time (let's say 100ms) or as a callback to /odom message. I tried different combinations and methods, no luck so far. My guess is that it might related to how the tf transforms are timed. I don't quite understand yet how this message filter is working, that's what it gives: I cannot upload the pic of tf tree (given with ros2 run tf2_tools view_frames.py command), but it looks good to me: map => odom => base_link => cloud. So, probably my question would boil down to the following: why having the static transforms everything works fine, and exchanging one transform (odom => base_link) would result in such an error. How specifically I can check that the transform is carried out properly and expected for the slam_gmapping algorithm. PS: the forked gmapping looks the same as popular https://github.com/ros-perception/sla... for ROS1, but not officially supported as https://github.com/SteveMacenski/slam.... |
| 2022-03-25 15:35:13 -0500 | marked best answer | Don't see scan message on Rviz even though it's published I'm trying to solve this puzzle. It seems to be simple but it doesn't work. So, the OdomNode is subscribed to the original LaserScan message on /sick_lrs_36x1/scan topic. It receives the message and call LaserScan publisher to publish the message on /scan topic. A customized message is published with a new frame_id and with now timestamp. The original scan message is getting played using the bag tool. Running
seems to give exact message as
Interestingly, I can observe the /sick_lrs_36x1/scan in rviz, but cannot see the customized message. Below is my code: |
| 2022-03-25 15:33:54 -0500 | marked best answer | dynamic gmapping in ROS it is a general question. Gmapping seems to be used only for creating a map of the static environment. Once created, it doesn't account for any changes - you add a new object, but it's being ignored and not reflected in the map. Is there any way to modify gmapping so it can be used for changing environments? What other methods can be used in this case? I don't care about localization, only need mapping of the dynamically changing environment. Any thoughts or comments are very welcome! |
| 2022-03-25 15:33:54 -0500 | received badge | ● Scholar (source) |
| 2022-03-25 15:32:25 -0500 | commented question | slam_toolbox incomplete mapping Thank you. Actually when I moved the scanner, the mapping filled itself, so it appears like the behavior is normal, thou |
| 2022-03-24 14:20:43 -0500 | edited question | slam_toolbox incomplete mapping slam_toolbox incomplete mapping Installed slam_toolbox on Foxy, Ubuntu 20.04: sudo apt install ros-foxy-slam-toolbox |
| 2022-03-24 14:19:53 -0500 | edited question | slam_toolbox incomplete mapping slam_toolbox incomplete mapping Installed slam_toolbox on Foxy, Ubuntu 20.04: sudo apt install ros-foxy-slam-toolbox |
| 2022-03-24 14:13:26 -0500 | asked a question | slam_toolbox incomplete mapping slam_toolbox incomplete mapping Installed slam_toolbox on Foxy, Ubuntu 20.04: sudo apt install ros-foxy-slam-toolbox |
| 2022-03-24 10:33:58 -0500 | received badge | ● Popular Question (source) |
| 2022-03-24 06:54:01 -0500 | received badge | ● Notable Question (source) |
| 2022-03-23 08:49:05 -0500 | edited answer | dynamic gmapping in ROS It appears like the term for dynamic mapping is life-long mapping. There's an experimental implementation of this algori |
| 2022-03-23 08:46:15 -0500 | answered a question | dynamic gmapping in ROS It appears like the term for dynamic mapping is life-long mapping. There's an experimental implementation of this algori |
| 2022-03-23 08:46:15 -0500 | received badge | ● Rapid Responder (source) |
| 2022-03-23 08:27:29 -0500 | received badge | ● Teacher (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.