The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-06-10 12:55:17 -0500 | marked best answer | Persistent Service reconnection I'm using ros hydro. I call a persistence service in this way: then I use my service: the method isValid return always false if I don't re-create the service handler. And apparently there's no way to restart a persistent service (such as a 'reconnect' method). it is correct to always recreate the ServiceClient? why I need to use the nodeHandler if I've already all the information needed inside the ServiceClient object? |
| 2019-06-24 04:32:22 -0500 | commented question | how to make Nao standing on the ground? I have the same problem in ubuntu 18 and ros melodic (code for Nao checked out from git) |
| 2018-12-06 15:02:53 -0500 | marked best answer | Where should I put configuration files? Where should I put node configuration files? (e.g. a knowledge base) What is the "ROS way" to access these files? I would like to have a node that reads some files in a folder at startup... files that can be modifyed by users. or there is a better "ROS way" to do that sort of things? edit: I'm only interested in wich is the best location where I can put configuration files and wich is the best way to get the path to these files... |
| 2018-03-05 08:51:19 -0500 | received badge | ● Famous Question (source) |
| 2017-04-28 19:54:54 -0500 | received badge | ● Notable Question (source) |
| 2017-01-19 10:25:21 -0500 | received badge | ● Popular Question (source) |
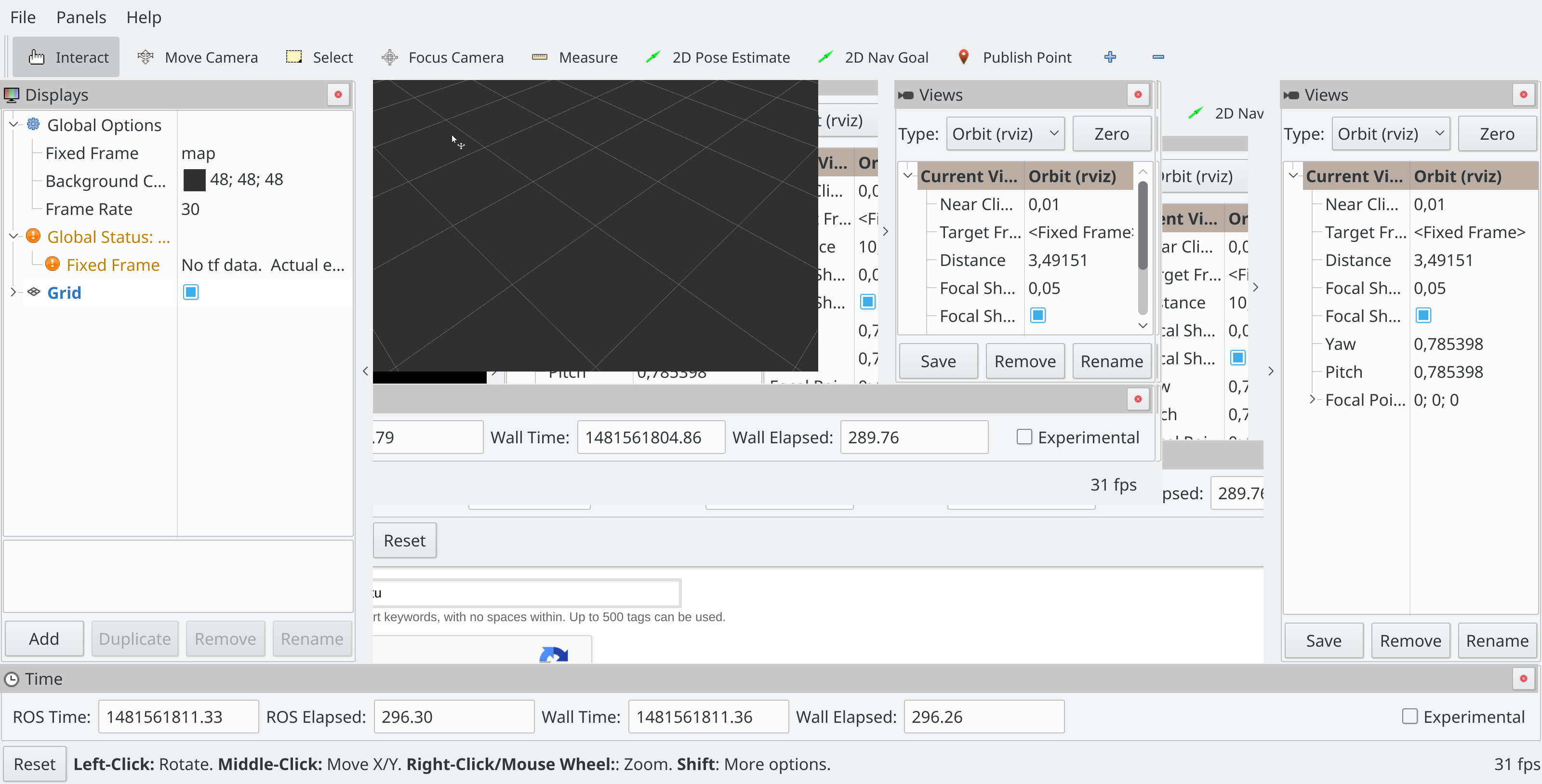
| 2016-12-12 11:03:55 -0500 | asked a question | rviz high dpi issue Hi,
I'm having issues on high dpi screen using rviz.
It seemes that the 3d rendering object doesn't scale properly, and each dimension is half the dimension he should be.
I'm using ubuntu (kubuntu) 16.04. Rviz is updated to the lst version ros-kinetic-rviz: Installato: 1.12.4-0xenial-20161027-160750-0700 The screen is using a scaling of 2x Maybe is related to this? http://www.ogre3d.org/forums/viewtopi... |
| 2016-11-30 20:46:09 -0500 | received badge | ● Good Question (source) |
| 2016-07-07 11:27:41 -0500 | received badge | ● Nice Question (source) |
| 2016-03-09 02:58:34 -0500 | received badge | ● Famous Question (source) |
| 2016-01-13 13:41:06 -0500 | commented answer | can I publish my own path and display in Rviz uhm, I don't have any clues then. I'm sure that all you have to do is tu publish the message and add a path entry in rviz and setup the correct topic... Because I've recently worked on the code for doing so (the one that I've linked to you). I'm sorry I couldn't help you... |
| 2016-01-13 01:51:06 -0500 | commented answer | can I publish my own path and display in Rviz The only difference that I can see wrt your code is that each trasform has an appropriate stamp and a frame name |
| 2016-01-13 01:49:52 -0500 | commented answer | can I publish my own path and display in Rviz Ok, I'm sure that if you want to show a path in rviz you should only publish the topic. See the (overcomplicated) example here: https://github.com/AIRLab-POLIMI/Simp... |
| 2016-01-12 17:03:27 -0500 | commented answer | can I publish my own path and display in Rviz my_path.header.frame_id = 'odom' I think should be 'world' (or 'map') |
| 2016-01-12 13:55:59 -0500 | answered a question | can I publish my own path and display in Rviz have you added the Path plugin in the rviz config? add -> path and then you have to select the correct topic (/aPath) |
| 2016-01-11 16:34:43 -0500 | received badge | ● Notable Question (source) |
| 2016-01-11 07:07:06 -0500 | commented answer | How to use Eigen with tf2? added pull request |
| 2016-01-11 06:36:12 -0500 | commented answer | How to use Eigen with tf2? opened issue |
| 2016-01-11 06:21:59 -0500 | commented answer | How to use Eigen with tf2? Yes, I saw the doxygen, but as you say is not so useful. Is completely missing an example of how to use properly the package with tf... |
| 2016-01-11 05:25:43 -0500 | received badge | ● Popular Question (source) |
| 2016-01-10 12:14:16 -0500 | asked a question | How to use Eigen with tf2? As tf is deprecated, I've started learning how to use tf2. Unfortunately the documentation and the tutorials are not complete, as the old tf tutorial where. In particular there's no explanation on how to publish in the most effective way an Eigen transformation throught tf. The only way I've managed to solve the problem, was writing a boilerplate code, filling a message manually. This happens as there's no function, as far as I can see, in the tf2_eigen package to convert an Eigen affine3D transformation into a geometry_message. There seemes to be no documentation for tf2_eigen package. If I'm wrong, can you please point me where I can find the documentation? And, by the way, the "external conversion" interface (that seemes to be complete only for kdl) is very strange, I would expect a templated broadcaster, in wich i could send an eigen transform like this: |
| 2015-03-28 22:08:25 -0500 | received badge | ● Famous Question (source) |
| 2015-03-28 22:08:25 -0500 | received badge | ● Famous Question (source) |
| 2014-11-20 17:23:45 -0500 | commented answer | How to export a debug and release library? @Wiliam: you mean if(debug) ... else() ... ? @Dirk: any build (relase/debug). an this time also with catkin make. Why this happens is obvious (specifing the library in such a way means that BOTH should be present always). @Wiliam: exactly. just using CMAKE_DEBUG_POSTFIX... |
| 2014-11-20 17:23:45 -0500 | received badge | ● Commentator |
| 2014-11-20 16:28:29 -0500 | commented answer | How to export a debug and release library? Changed title. Ok, now the system works, still the build fails the first time, because both library are needed to build. However, the library links properly... |
| 2014-11-20 04:32:43 -0500 | commented answer | How to export a debug and release library? This doesn't work... Obviously fixes the debug build, but now you have an issue with the release build. The problem is that catkin should be aware of the CMAKE_<conf>_POSTFIX variables when generating the Find<package> cmake module. using debug suffix is widely used in libraries like g2o and qt. |
| 2014-11-20 01:41:34 -0500 | received badge | ● Notable Question (source) |
| 2014-11-19 12:20:49 -0500 | commented question | How to export a debug and release library? Have you tried catkin_make_isolated -DCMAKE_BUILD_TYPE=Debug? Please consider to run it on a clean workspace to avoid side effects (it seemes that if the release libraries exists, the linker uses them instead of Debug version). With catkin_make it works perfectly, the problem is the isolation... |
| 2014-11-19 11:38:28 -0500 | received badge | ● Popular Question (source) |
| 2014-11-19 08:03:20 -0500 | commented question | How to export a debug and release library? ps: i don't know how to upload files, so i've used dropbox... if there is a better way to share the workspace tell me... |
| 2014-11-19 07:39:57 -0500 | received badge | ● Famous Question (source) |
| 2014-11-19 07:33:19 -0500 | commented question | How to export a debug and release library? I'm so sorry, I missed to tell that you should set a debug postfix to see the issue. i was missing the point because the library is huge, and I've only worked on the catkinization. here is a minimal example of the setup: |
| 2014-11-18 09:18:02 -0500 | asked a question | How to export a debug and release library? I have package A in workspace1, and i build the package using: When I try to compile package B in workspace2 using: Build fails with message: same issue when building with catkin_make_isolated a workspace with both packages inside (catkin_make compilation runs clean). I don't know if this behaviour is by catkin design or if it's a bug, or if it's all my fault. I'm using ROS indigo on debian, compiled by source. I've also tested in ROS groovy on ubuntu 12.10. |
| 2014-08-12 09:02:59 -0500 | received badge | ● Enthusiast |
| 2014-07-24 10:39:50 -0500 | received badge | ● Famous Question (source) |
| 2014-07-10 04:19:55 -0500 | received badge | ● Notable Question (source) |
| 2014-05-22 04:01:30 -0500 | commented answer | Persistent Service reconnection so, up to now, the "best" way is to recreate the ServiceClient from nodeHanlder? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.