The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-05-20 12:14:12 -0500 | received badge | ● Famous Question (source) |
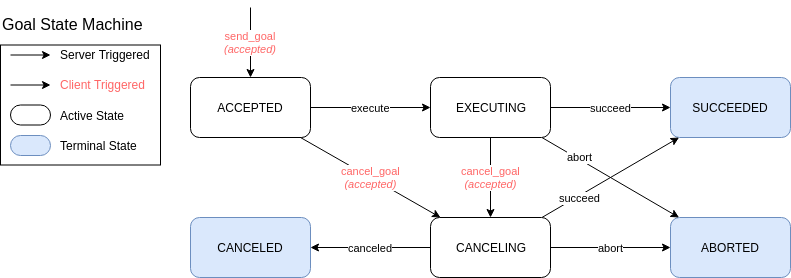
| 2021-03-17 23:33:11 -0500 | marked best answer | What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine?
From the figure above, when exactly does the used-defined functions ( What I understand from the document is that: once we return But for cancelling the action, I am a little bit confused reading the document. From the document, it is written that:
But once we return |
| 2021-03-17 23:33:11 -0500 | received badge | ● Scholar (source) |
| 2021-03-17 23:33:08 -0500 | received badge | ● Notable Question (source) |
| 2021-03-02 02:45:19 -0500 | commented answer | What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine? @jacobperron I'm just curious if I understand correctly that the handle_cancel is also a blocking call as well as handle |
| 2021-03-02 02:45:19 -0500 | commented answer | What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine? @jacobperron Thanks for your detailed explanation. Aha, so it seems the design is that: the user (server side) is respon |
| 2021-03-02 02:45:18 -0500 | commented question | What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine? @kscottz Sorry, I posted on ROS Discourse first and I realized I should post here. Will remove my post on ROS Discourse. |
| 2021-03-02 02:25:50 -0500 | received badge | ● Supporter (source) |
| 2021-03-01 23:08:30 -0500 | received badge | ● Popular Question (source) |
| 2021-03-01 09:03:15 -0500 | asked a question | What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine? What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine? From the figure above, when exactly d |
| 2021-02-14 04:25:22 -0500 | received badge | ● Enthusiast |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.