The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-11-08 05:19:13 -0500 | received badge | ● Famous Question (source) |
| 2022-06-05 11:17:13 -0500 | received badge | ● Famous Question (source) |
| 2022-05-23 08:58:00 -0500 | received badge | ● Notable Question (source) |
| 2021-12-19 15:34:53 -0500 | received badge | ● Notable Question (source) |
| 2021-07-21 08:20:17 -0500 | received badge | ● Famous Question (source) |
| 2021-05-17 11:16:08 -0500 | received badge | ● Notable Question (source) |
| 2021-04-22 11:23:26 -0500 | received badge | ● Popular Question (source) |
| 2021-04-13 10:53:57 -0500 | received badge | ● Famous Question (source) |
| 2021-04-12 08:59:31 -0500 | received badge | ● Popular Question (source) |
| 2021-04-11 01:59:51 -0500 | commented question | Process crashes without any error @gvdhoorn I think I have actually solved the problem, there was something wrong with the 2D map pgm file itself as I men |
| 2021-04-11 01:59:39 -0500 | commented question | Process crashes without any error @gvdhoorn I think I have actually solved the problem, there was something wrong with the 2D map pgm file itself as I men |
| 2021-04-11 00:29:48 -0500 | asked a question | Process crashes without any error Process crashes without any error I have written a hybrid a* package for ROS and I'm testing the implementation through |
| 2021-04-04 04:26:36 -0500 | received badge | ● Famous Question (source) |
| 2021-03-22 07:29:52 -0500 | commented answer | How to use a subscriber in a global planner plugin? The problem was with the path being passed, I've solved it now. Thanks! |
| 2021-03-22 00:38:25 -0500 | marked best answer | How to use a subscriber in a global planner plugin? I am trying to write a custom global planner using this tutorial. I am not computing my path in this global planner, all I want to do is make this global planner pass on a path that is computed by my other package to the move_base/local planner. How do I define a subscriber and its callback function in the plugin so that it takes in the published path? Trying to execute option 2 from this answer. |
| 2021-03-20 01:51:22 -0500 | received badge | ● Notable Question (source) |
| 2021-03-20 01:50:19 -0500 | commented answer | How to use a subscriber in a global planner plugin? I did implement this exactly as you mentioned and it partly works. The solution is received from another node where the |
| 2021-03-20 01:50:02 -0500 | commented answer | How to use a subscriber in a global planner plugin? I did implement this exactly as you mentioned and it partly works. The solution is received from another node where the |
| 2021-03-19 11:17:06 -0500 | commented answer | How to follow a nav_msgs/path ? @mgruhler Here is my new question - https://answers.ros.org/question/374307/how-to-use-a-subscriber-in-a-global-planner- |
| 2021-03-19 10:31:46 -0500 | received badge | ● Popular Question (source) |
| 2021-03-19 09:35:47 -0500 | commented answer | How to follow a nav_msgs/path ? @mgruhler Hey, I have created a package that computes a global path and I want to execute option 2 from your answer wher |
| 2021-03-19 09:15:28 -0500 | received badge | ● Commentator |
| 2021-03-19 09:15:28 -0500 | commented answer | How to use a subscriber in a global planner plugin? I already have a working package that computes the path, don't want to convert it to a plugin class right now. I am able |
| 2021-03-19 00:15:43 -0500 | asked a question | How to use a subscriber in a global planner plugin? How to use a subscriber in a global planner plugin? I am trying to write a custom global planner using this tutorial. I |
| 2021-03-05 01:59:11 -0500 | marked best answer | Which planner to use for a mobile robot-trailer system? Want to clarify it is a simulation only project for now. I am building a mobile robot-trailer system for indoor environments. My setup includes a Clearpath Robotics Ridgeback robot towing a custom cart. I have changed the Ridgeback to a normal differential drive from its Mecanum drive system. I am facing two problems.
Please help me with these problems. |
| 2021-03-05 01:59:11 -0500 | commented answer | Which planner to use for a mobile robot-trailer system? @DubinsCar I am currently implementing the Hybrid A* algorithm in C++ for ROS but am unable to figure out how to impleme |
| 2021-03-03 09:30:15 -0500 | received badge | ● Famous Question (source) |
| 2021-02-04 07:42:00 -0500 | received badge | ● Popular Question (source) |
| 2021-02-04 00:49:11 -0500 | commented question | Continuous joints don't rotate/work @tryan, you are indeed correct. 0.0001 was a little too much as the wheels didn't remain in contact with the ground but |
| 2021-02-03 08:06:40 -0500 | commented answer | How to visualise under-actuated joints in rviz? Hey @tryan, I have started another question with some issues I'm facing. Here is the link - https://answers.ros.org/ques |
| 2021-02-03 08:06:08 -0500 | commented answer | How to visualise under-actuated joints in rviz? Hey @tryan, I have started another question with some issues I'm facing. Please take a look if possible, thanks. |
| 2021-02-03 08:05:02 -0500 | edited question | Continuous joints don't rotate/work Continuous joints don't rotate/work I am working on a project where I have attached a custom-designed four-wheel cart on |
| 2021-02-03 08:03:46 -0500 | edited question | Continuous joints don't rotate/work Continuous joints don't rotate/work I am working on a project where I have attached a custom-designed four-wheel cart on |
| 2021-02-03 08:01:13 -0500 | edited question | Continuous joints don't rotate/work Continuous joints don't rotate/work I am working on a project where I have attached a custom-designed four-wheel cart on |
| 2021-02-03 08:01:13 -0500 | received badge | ● Editor (source) |
| 2021-02-02 08:26:52 -0500 | edited question | Continuous joints don't rotate/work Continuous joints don't rotate/work I am working on a project where I have attached a custom-designed four-wheel cart on |
| 2021-02-02 08:25:57 -0500 | asked a question | Continuous joints don't rotate/work Continuous joints don't rotate/work I am working on a project where I have attached a custom-designed four-wheel cart on |
| 2021-01-20 23:28:53 -0500 | commented answer | How to visualise under-actuated joints in rviz? Thank you for all your help. The friction and damping values have solved the drift problem. The new problem is, since th |
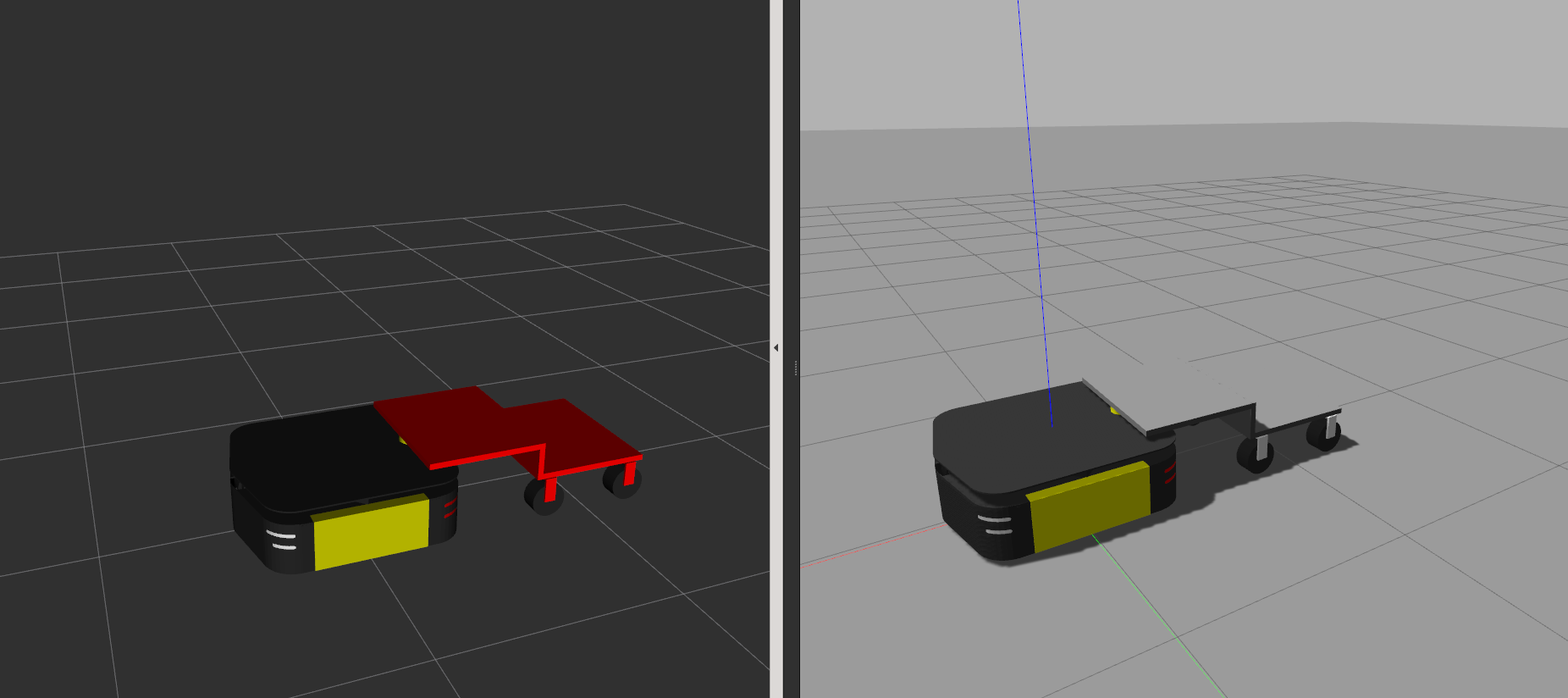
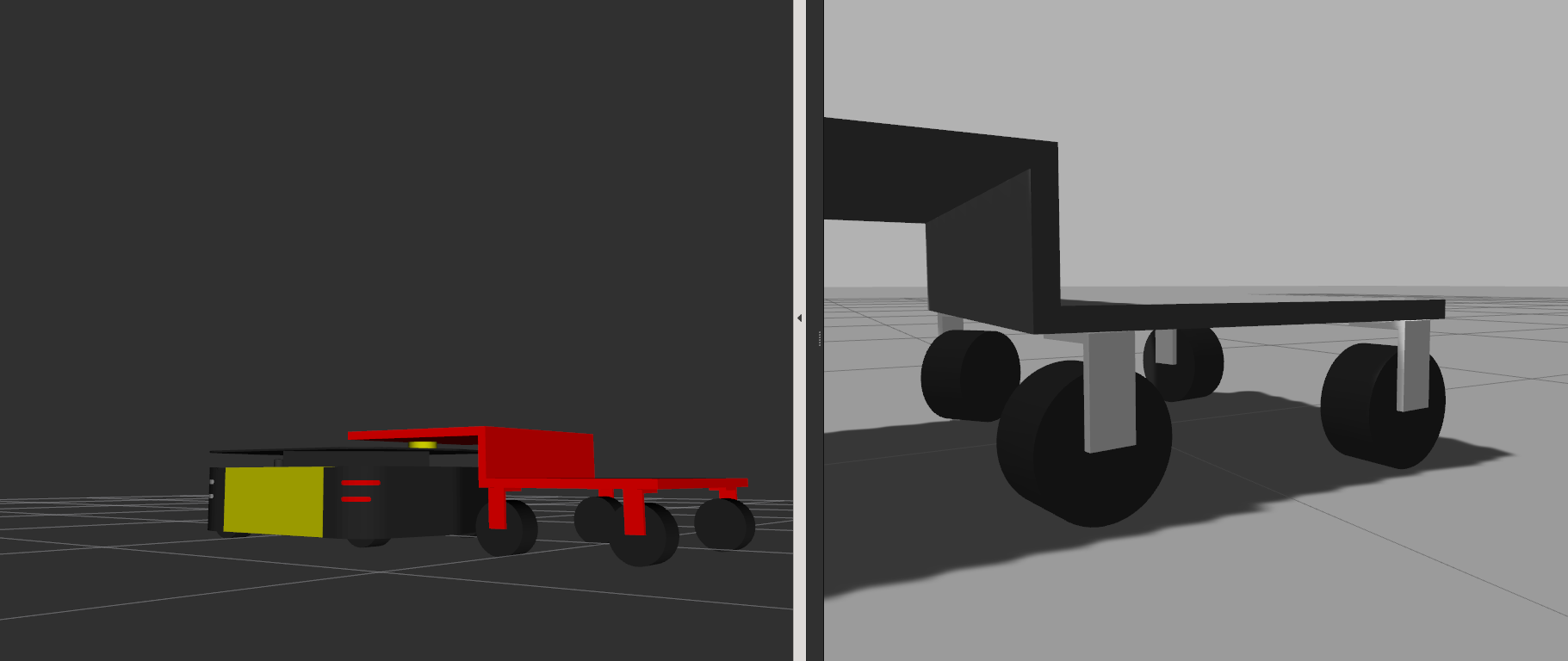
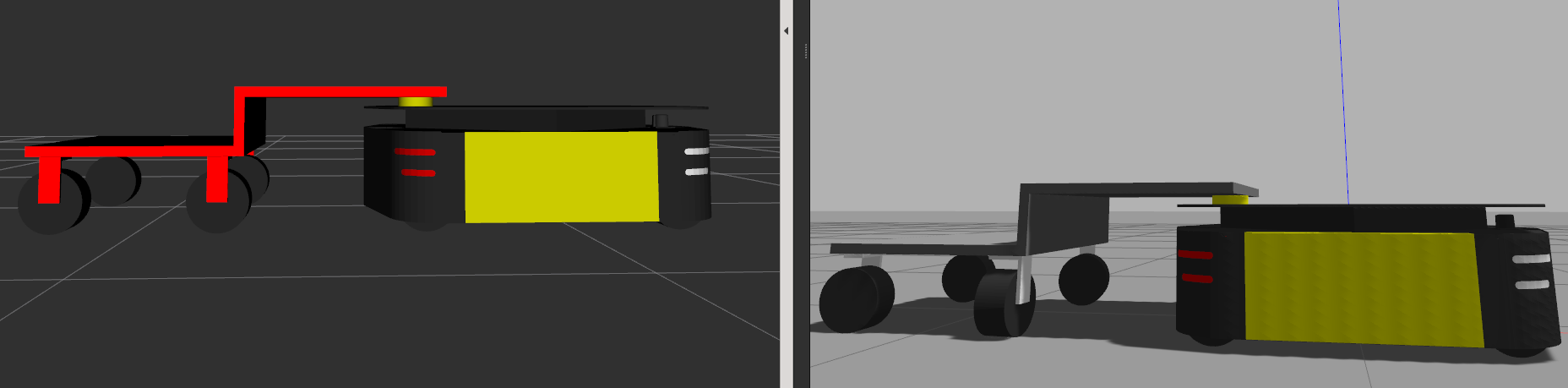
| 2021-01-20 23:26:11 -0500 | marked best answer | How to visualise under-actuated joints in rviz? I am working on a project where I have attached a custom-designed four-wheel cart on the rear axle of the Clearpath Robotics Ridgeback robot. I have two problems -
Here are some pictures of the system I am using - https://drive.google.com/file/d/1xkEU... https://drive.google.com/file/d/1Xz2B... https://drive.google.com/file/d/1Tjo3...
Please help me solve these problems. Thank You. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.