The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-22 10:05:54 -0500 | received badge | ● Famous Question (source) |
| 2023-03-20 20:40:25 -0500 | received badge | ● Notable Question (source) |
| 2023-02-26 08:08:53 -0500 | received badge | ● Enlightened (source) |
| 2023-02-26 08:08:53 -0500 | received badge | ● Good Answer (source) |
| 2023-01-27 03:54:50 -0500 | received badge | ● Famous Question (source) |
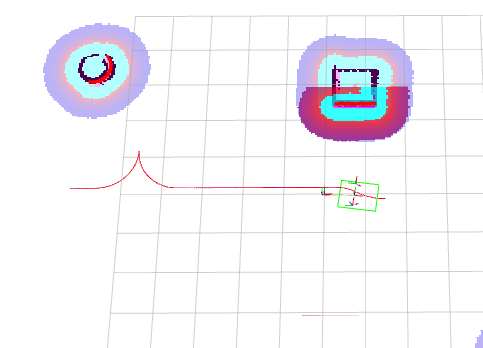
| 2023-01-26 19:44:36 -0500 | marked best answer | smac lattice planner for differential robot env: ros2 humble on ubuntu 22.04 I am trying to use smac lattice planner for my differential/rectangular robot. I noticed that when the robot arrives near goal, it parks as a vehicle and it does not rotate on goal. in nav2 documentation it says that the planner is suitable for differential non-circular robot. How can I make the robot rotate on goal ? here is the screen and config:
and for the primitive config: |
| 2023-01-26 19:44:34 -0500 | commented answer | smac lattice planner for differential robot the minimum turning_radius value that I can set to generate the lattice file is 0.08, else the script got division by ze |
| 2023-01-08 17:03:24 -0500 | received badge | ● Popular Question (source) |
| 2023-01-04 03:13:48 -0500 | received badge | ● Good Question (source) |
| 2023-01-04 03:13:47 -0500 | received badge | ● Nice Answer (source) |
| 2022-12-28 12:17:04 -0500 | commented answer | smac lattice planner for differential robot when I set it to 0, the robot arrive to goal and stops, it does not rotate to meet the desired orientation. |
| 2022-12-28 12:16:08 -0500 | commented question | smac lattice planner for differential robot the controller is following the exact path (as expected), but the generated path from the planner is not suitable for di |
| 2022-12-28 12:15:31 -0500 | commented question | smac lattice planner for differential robot the controller is following the exact path (as expected), but the generated path from the planner is not suitable for di |
| 2022-12-22 10:13:25 -0500 | commented answer | How to generate custom control sets for Smac State Lattice Planner? I am facing a problem for tunning a differential/rectangular robot, did anyone of you figure out how to customize it ? h |
| 2022-12-21 20:29:39 -0500 | edited question | smac lattice planner for differential robot smac lattice planner for differential robot env: ros2 humble on ubuntu 22.04 I am trying to use smac lattice planner fo |
| 2022-12-21 20:24:09 -0500 | asked a question | smac lattice planner for differential robot smac lattice planner for differential robot env: ros2 humble on ubuntu 22.04 I am trying to use smac lattice planner fo |
| 2022-11-28 18:57:36 -0500 | received badge | ● Famous Question (source) |
| 2022-10-26 19:53:46 -0500 | asked a question | Local planer does not follow global plan Local planer does not follow global plan Ubuntu 22.04 / ROS 2 Humble Hi, the local planner does not tightly follow the |
| 2022-10-25 20:24:19 -0500 | received badge | ● Notable Question (source) |
| 2022-09-21 06:17:19 -0500 | received badge | ● Famous Question (source) |
| 2022-08-31 02:16:55 -0500 | received badge | ● Self-Learner (source) |
| 2022-08-30 14:18:13 -0500 | edited answer | tf2 view_frames under namespace I've checked the package code and figure out that the command should be run like this: ros2 run tf2_tools view_frames - |
| 2022-08-30 14:18:07 -0500 | commented answer | tf2 view_frames under namespace Thanks @zechurbo, I've posted a cleaner solution. |
| 2022-08-30 14:17:16 -0500 | marked best answer | tf2 view_frames under namespace Hi community, env: ROS2 Galactic how can I view the frames of a name-spaced simulation ? the command ros2 run tf2_tools view_frames does not work when I set a namespace.
Thanks |
| 2022-08-30 14:17:11 -0500 | answered a question | tf2 view_frames under namespace I've checked the package code and figure out that the command should be run like this: ros2 run tf2_tools view_frames -- |
| 2022-08-30 05:20:04 -0500 | received badge | ● Nice Question (source) |
| 2022-08-30 05:19:55 -0500 | received badge | ● Popular Question (source) |
| 2022-07-31 22:51:34 -0500 | edited question | tf2 view_frames under namespace tf2 view_frames under namespace Hi community, env: ROS2 Galactic how can I view the frames of a name-spaced simulation |
| 2022-07-31 22:50:08 -0500 | asked a question | tf2 view_frames under namespace tf2 view_frames under namespace Hi community, env: ROS2 Galactic how can I view the frames of a name-spaced simulation |
| 2022-07-08 13:19:37 -0500 | commented answer | galactic keepout_filter inflation I didn't manage to resolve it, maybe in the next few months i will get back to this task. |
| 2022-03-04 12:08:27 -0500 | received badge | ● Notable Question (source) |
| 2021-12-10 09:13:36 -0500 | received badge | ● Famous Question (source) |
| 2021-10-27 10:01:23 -0500 | received badge | ● Famous Question (source) |
| 2021-10-05 00:50:48 -0500 | marked best answer | Nav2 - global_planner does not avoid obstacles Hi, I am tunning nav2 parameters for a rectangular robot, when I send a goal that requires obstacle avoidance the planner does not avoid the obstacle, here is my param file and screenshot. Thanks for help.
|
| 2021-09-28 03:47:12 -0500 | received badge | ● Notable Question (source) |
| 2021-09-23 02:55:31 -0500 | received badge | ● Notable Question (source) |
| 2021-09-16 08:49:45 -0500 | received badge | ● Famous Question (source) |
| 2021-08-21 05:54:26 -0500 | received badge | ● Famous Question (source) |
| 2021-08-02 22:06:25 -0500 | marked best answer | navigation2 - Set two scan topics to AMCL Hi, Env: ROS2 Foxy / Ubuntu 20.04 I have a robot navigating with two Lidars, so I have two topics /scan_front and /scan_back. in the costmap i am setting observation_sources: scan1 scan2, but how can I set two scan topics in the parameter "scan_topic" for AMCL ? Thanks in advance. |
| 2021-07-30 16:04:58 -0500 | received badge | ● Popular Question (source) |
| 2021-07-22 00:49:20 -0500 | asked a question | Spatio-temporal voxel layer to avoid 3d obstacles Spatio-temporal voxel layer to avoid 3d obstacles Hi community, env: Galactic I am trying to implement the Spatio-temp |
| 2021-07-21 17:46:44 -0500 | answered a question | Is URDF plugin's namespace different from topic's namespace? Here is what I did for namespace and it's working well: In a file robots.launch: (here I show you only the group tag) |
| 2021-07-21 06:53:28 -0500 | received badge | ● Nice Answer (source) |
| 2021-07-20 20:22:54 -0500 | received badge | ● Rapid Responder (source) |
| 2021-07-20 20:22:54 -0500 | answered a question | No /odom or /cmd_vel topics when using diff drive plugin In this link you will find how to use many gazebo plugins for ROS2 including diff_drive. Here is an example of how to u |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.