The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-06 08:22:57 -0500 | received badge | ● Famous Question (source) |
| 2023-06-06 08:22:57 -0500 | received badge | ● Notable Question (source) |
| 2023-06-06 08:22:57 -0500 | received badge | ● Popular Question (source) |
| 2021-11-23 03:48:49 -0500 | received badge | ● Famous Question (source) |
| 2021-08-28 07:15:18 -0500 | received badge | ● Popular Question (source) |
| 2021-08-23 14:40:19 -0500 | commented answer | Adding both a timer and subscription to the executor seems to cause error_loop() to run Hi Pablo, thank you for replying, your suggestion has solved my problem. |
| 2021-08-23 14:31:11 -0500 | marked best answer | Adding both a timer and subscription to the executor seems to cause error_loop() to run Hi all, I'm working with micro-ros and I'm trying to add in my script a timer and subscription, but always it cause an error in error_loop when it’s execued. It's posible to have them both in the same script?.
Thank you for your help. |
| 2021-08-20 10:17:35 -0500 | edited question | Adding both a timer and subscription to the executor seems to cause error_loop() to run Adding both a timer and subscription to the executor seems to cause error_loop() to run Hi all, I'm working with micro-r |
| 2021-08-20 10:17:29 -0500 | edited question | Adding both a timer and subscription to the executor seems to cause error_loop() to run Adding both a timer and subscription to the executor seems to cause error_loop() to run Hi all, I'm working with micro-r |
| 2021-08-20 10:16:40 -0500 | asked a question | Adding both a timer and subscription to the executor seems to cause error_loop() to run Adding both a timer and subscription to the executor seems to cause error_loop() to run Hi all, I'm working with micro-r |
| 2021-08-18 17:40:41 -0500 | received badge | ● Notable Question (source) |
| 2021-08-12 18:30:27 -0500 | received badge | ● Self-Learner (source) |
| 2021-08-12 18:30:27 -0500 | received badge | ● Teacher (source) |
| 2021-08-12 18:29:26 -0500 | received badge | ● Popular Question (source) |
| 2021-08-12 18:24:18 -0500 | answered a question | rviz2 does not display an urdf file Hi ijnek's, I don't know why I didn't see this.... buff. I had other bugs that I have already fixed and I didn't see thi |
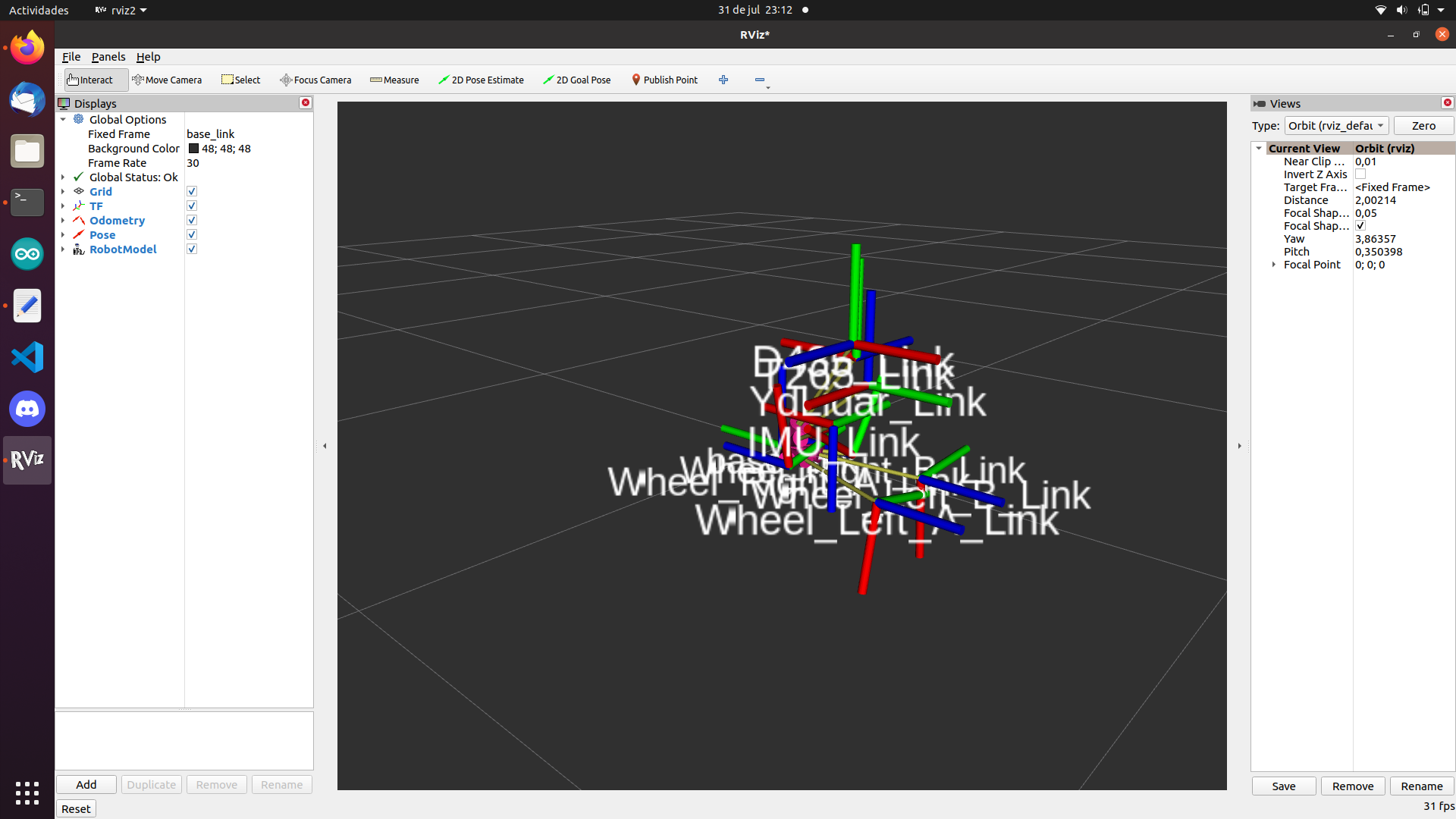
| 2021-08-12 18:14:49 -0500 | marked best answer | rviz2 does not display an urdf file Hello everyone, I have a question related to rviz2. I am trying to display an urdf and rviz2 show this:
I got the tf but I can't represent the 3D models. Thank you |
| 2021-08-12 15:37:23 -0500 | edited question | rviz2 does not display an urdf file rviz2 does not display an urdf file Hello everyone, I have a question related to rviz2. I am trying to display an urdf a |
| 2021-08-12 15:32:53 -0500 | edited question | rviz2 does not display an urdf file rviz2 does not display an urdf file Hello everyone, I have a question related to rviz2. I am trying to display an urdf a |
| 2021-08-09 02:08:23 -0500 | edited question | rviz2 does not display an urdf file rviz2 does not display an urdf file Hello everyone, I have a question related to rviz2. I am trying to display an urdf a |
| 2021-08-08 17:55:56 -0500 | asked a question | rviz2 does not display an urdf file rviz2 does not display an urdf file Hello everyone, I have a question related to rviz2. I am trying to display an urdf a |
| 2021-07-25 12:00:37 -0500 | answered a question | Problem using vector3_stamped in Micro-ROS I solved my problem: RCSOFTCHECK(rcl_publish(&speed_publisher, speed_message, NULL)); Thank you |
| 2021-07-25 12:00:37 -0500 | received badge | ● Rapid Responder (source) |
| 2021-07-23 15:21:23 -0500 | asked a question | Problem using vector3_stamped in Micro-ROS Problem using vector3_stamped in Micro-ROS Hi all, I'm building a new robot with micro-ros, I'm using a Portenta-H7 and |
| 2021-07-23 14:12:33 -0500 | marked best answer | Problems with my robot and rtabmap Hello everyone, after a month of trying to solve some issues , I haven`t got any lucky. That is why I am turning to this forum to see if someone can help me with it . Here is my problem in context: I have designed a robot in which I use a jetson nano, Arduino mMega 2560, IMU- MPU6050, Intel Realsense D435, T256, ydlidar X4 and ROS Melodic. Problem 1 When I try to integrate the ros rtabmap package the figure shows how rviz represents the point cloud.
I have tried to apply a transformation to the cameras to rotate the point cloud and display it correctly: Position and orientation of the D435 camera within the URDF: xyz = -0.047515, -0.0065262, 0.64317 rpy = -1.5708, 0, -1.5708 Position and orientation of the T265 camera within the URDF: xyz = -0.035015, -0.0065262, 0.58873 rpy = 1.5708, 0, 1.5708
Problem 2 When I try to do 2D navigation, ros returns these errors and warnings and I don't know how to fix it: Rqt Graph Nodes Only
Nodes Topics
All Nodels
Thank you for your help. jarain78 |
| 2021-07-13 07:53:05 -0500 | received badge | ● Famous Question (source) |
| 2021-07-13 07:53:05 -0500 | received badge | ● Notable Question (source) |
| 2021-05-02 15:18:07 -0500 | received badge | ● Popular Question (source) |
| 2021-03-22 17:05:58 -0500 | edited question | Problems with my robot and rtabmap Problems with my robot and rtabmap Hello everyone, after a month of trying to solve some issues , I haven`t got any luck |
| 2021-03-22 16:51:45 -0500 | edited question | Problems with my robot and rtabmap Problems with my robot and rtabmap Hello everyone, after a month of trying to solve some issues , I haven`t got any luck |
| 2021-03-22 16:51:41 -0500 | edited question | Problems with my robot and rtabmap Problems with my robot Hello everyone, after a month of trying to solve some issues , I haven`t got any lucky. That is |
| 2021-03-22 16:50:46 -0500 | edited question | Problems with my robot and rtabmap Problems with my robot Hello everyone, after a month of trying to solve some issues , I haven`t got any lucky. That is |
| 2021-03-22 16:47:01 -0500 | asked a question | Problems with my robot and rtabmap Problems with my robot Hello everyone, after a month of trying to solve some issues , I haven`t got any lucky. That is |
| 2021-02-08 05:20:05 -0500 | received badge | ● Famous Question (source) |
| 2020-09-21 03:34:35 -0500 | received badge | ● Notable Question (source) |
| 2020-07-02 02:15:16 -0500 | commented question | Encoder Odometry Problems Hey, Billy, thanks for the comment. I solved my problem, it was like you said the data had been corrupted. Thank you |
| 2020-07-02 02:14:36 -0500 | answered a question | Encoder Odometry Problems Hey, Billy, thanks for the comment. I solved my problem, it was like you said the data had been corrupted. Thank you |
| 2020-06-24 07:55:08 -0500 | received badge | ● Popular Question (source) |
| 2020-06-24 02:10:54 -0500 | commented question | Encoder Odometry Problems Hey, Billy, thanks for the comment. The encoder is real, I use the external interruption of an Arduino to count the enco |
| 2020-06-24 02:02:54 -0500 | edited question | Encoder Odometry Problems Encoder Odometry Problems Hi, I have a problem with my robot and its encoders, basically, I'm trying to get the position |
| 2020-06-23 05:16:13 -0500 | edited question | Encoder Odometry Problems Encoder Odometry Problems Hi, I have a problem with my robot and its encoders, basically, I'm trying to get the position |
| 2020-06-23 05:15:27 -0500 | edited question | Encoder Odometry Problems Encoder Odometry Problems Hi, I have a problem with my robot and its encoders, basically, I'm trying to get the position |
| 2020-06-23 05:15:27 -0500 | received badge | ● Editor (source) |
| 2020-06-23 05:14:15 -0500 | asked a question | Encoder Odometry Problems Encoder Odometry Problems Hi, I have a problem with my robot and its encoders, basically, I'm trying to get the position |
| 2020-05-02 09:11:27 -0500 | received badge | ● Popular Question (source) |
| 2020-03-21 05:42:42 -0500 | edited question | Linking the URDF to a writing robot. Linking the URDF to a writing robot. Hi, everyone, I have a question regarding an URDF file. I am making a simulation of |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.