The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-08-25 03:28:59 -0500 | received badge | ● Student (source) |
| 2018-02-10 14:34:03 -0500 | asked a question | This robot has a joint named "$joint_wheel_right_0" which is not in the gazebo model. This robot has a joint named "$joint_wheel_right_0" which is not in the gazebo model. Hi. there are a few topics like th |
| 2018-01-21 12:49:20 -0500 | commented answer | writing a driver for 4-wheels differential drive robot hi @VEGETA did you find the answer to this question? I have found some examples for this problem. However, they are all |
| 2018-01-21 12:37:39 -0500 | commented question | 4 wheel robot differential controller Hi @kallileo did you find the answer to this question? |
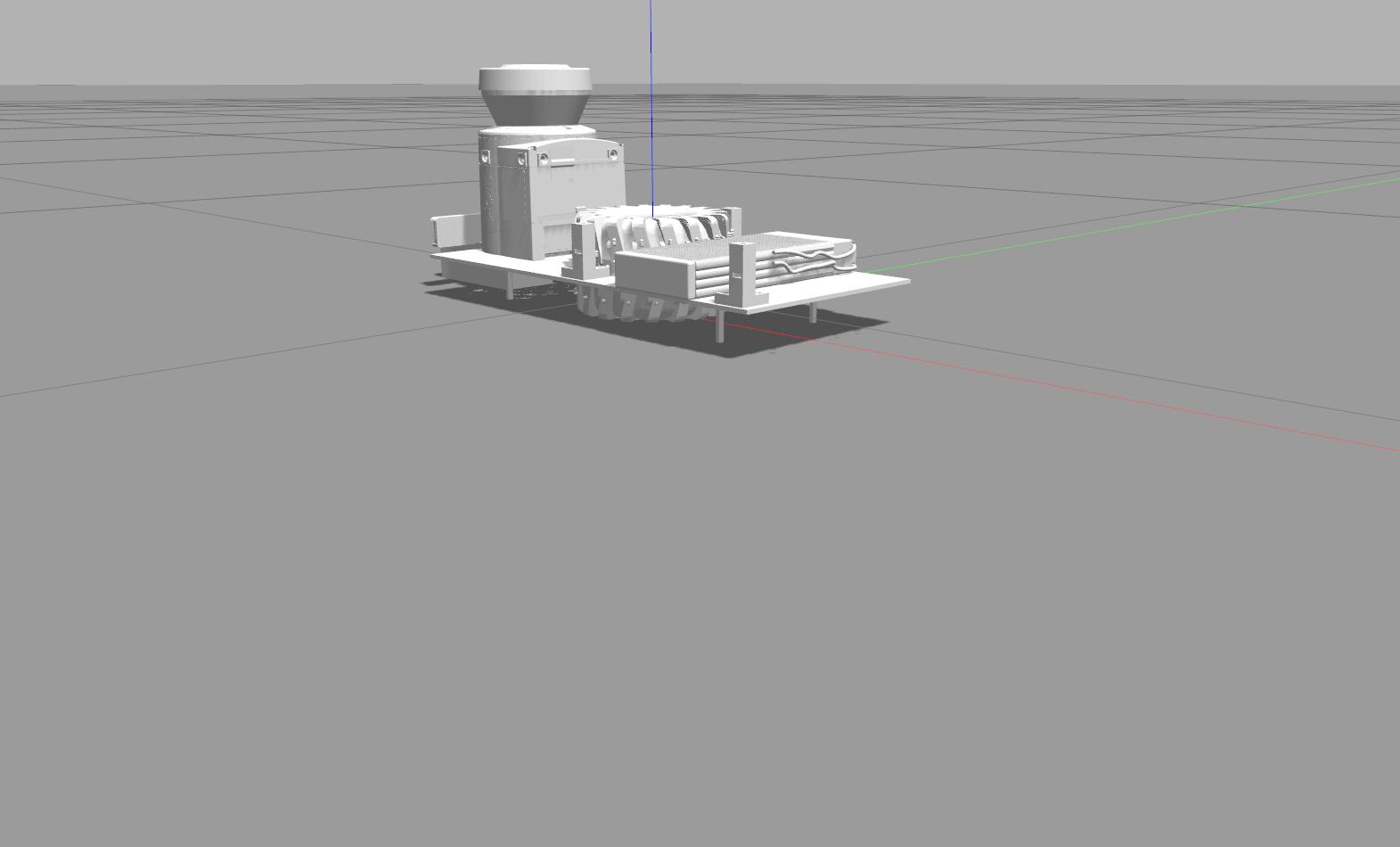
| 2018-01-14 04:42:35 -0500 | marked best answer | Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf file that I created, opens in rviz smoothly, however this urdf file opens in the gazebo incorrectly and the model file has missing links and joints. moving joints have linkage and linkage joints(eg: wheel) but none for fixed joints(eg: lidar,realsense ..). HOW CAN I SOLVE THE PROBLEM? The first time I run the file gazebo.Launch is the model gazebo image(wrong):
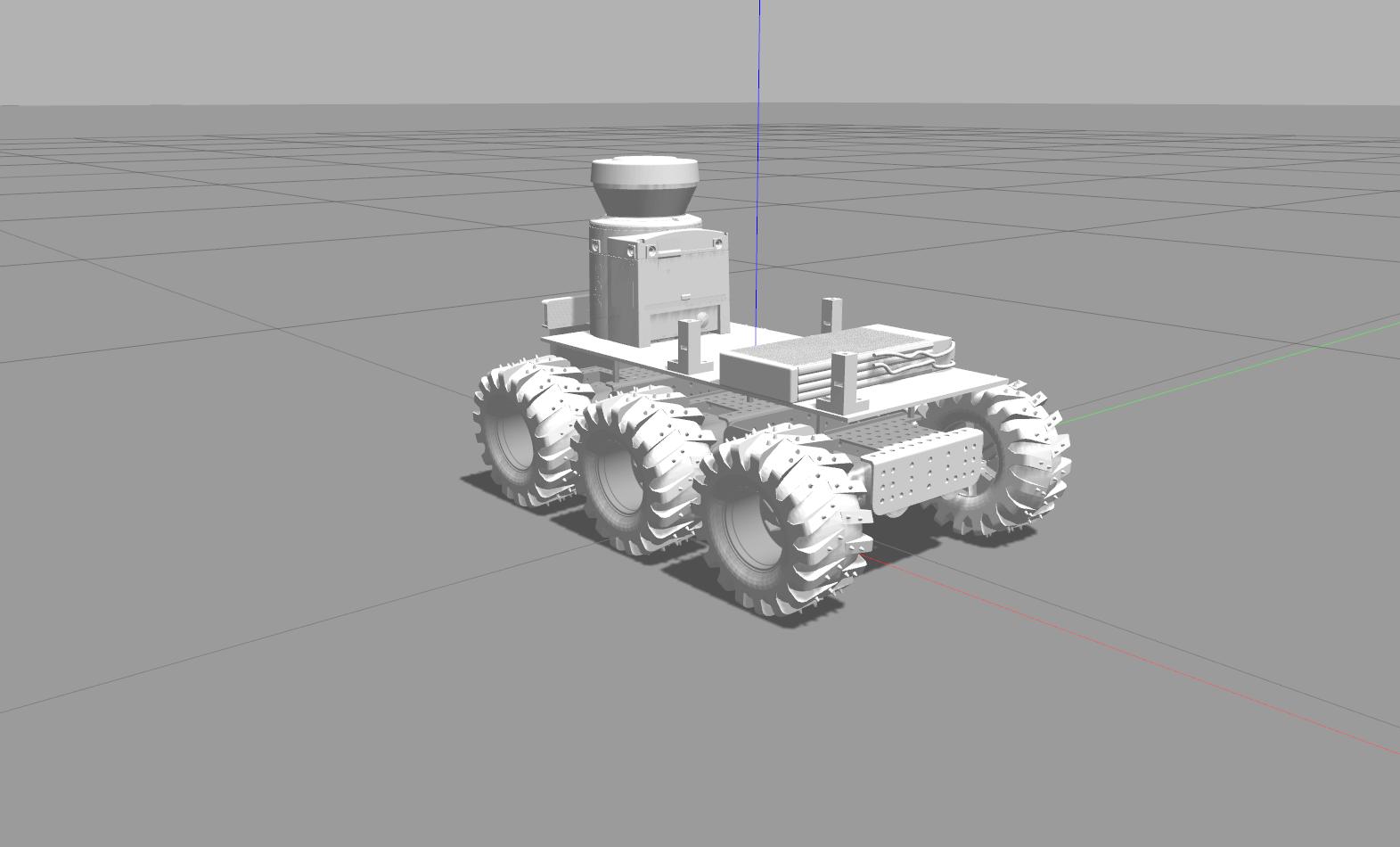
the image that appears when I reload the model after pressing the stop button on the lower toolbar:
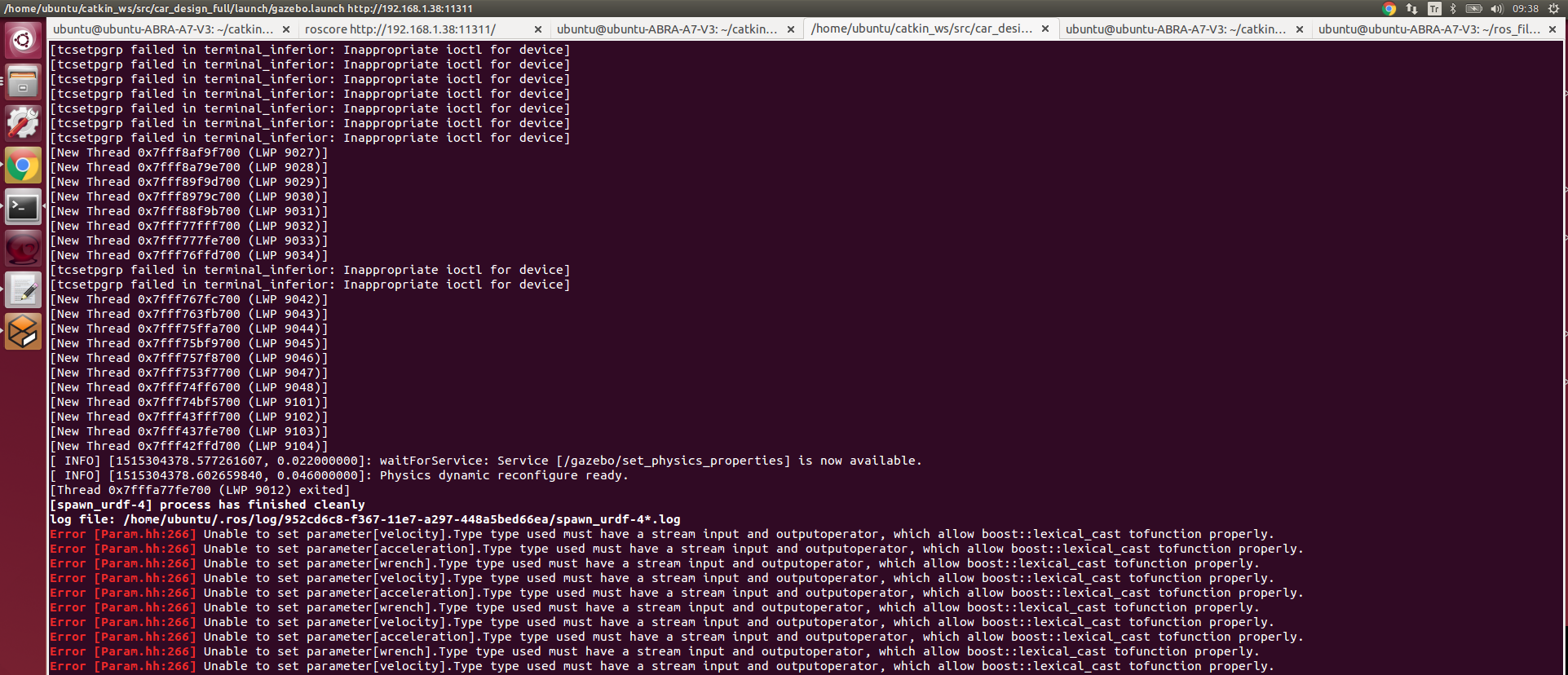
(model reload command: rosrun gazebo_ros spawn_model -file but the same mistakes still continue ( the model file has missing links and joints.) Gazebo errors that occur when I edit the model file: log file: /home/ubuntu/.ros/log/952cd6c8-f367-11e7-a297-448a5bed66ea/spawn_urdf-4*.log: |
| 2018-01-14 04:42:35 -0500 | received badge | ● Scholar (source) |
| 2018-01-12 07:49:52 -0500 | received badge | ● Enthusiast |
| 2018-01-11 06:05:30 -0500 | edited question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf |
| 2018-01-10 13:19:25 -0500 | received badge | ● Supporter (source) |
| 2018-01-08 15:56:16 -0500 | commented answer | Incorrect opening a urdf file in Gazebo If I do as you say, can they see the first instance of the problem? I'm new to this ros.answer platform. I apologize for |
| 2018-01-08 15:55:34 -0500 | commented answer | Incorrect opening a urdf file in Gazebo If I do as you say, can they see the first instance of the problem? I'm new to this ros.answer platform. I apologize for |
| 2018-01-08 15:50:05 -0500 | received badge | ● Famous Question (source) |
| 2018-01-08 15:39:21 -0500 | commented answer | Incorrect opening a urdf file in Gazebo thank you @clyde. I will try your suggestions. |
| 2018-01-08 15:37:22 -0500 | commented answer | Incorrect opening a urdf file in Gazebo @jayess The answer for RDaneelOlivaw. I could not comment on it because there was a length limit to comment. |
| 2018-01-08 15:33:10 -0500 | edited answer | Incorrect opening a urdf file in Gazebo Hi.@RDaneelOlivaw Thank you so much. As you said, I updated the urdf model. When I started my old launch file, my car w |
| 2018-01-08 15:32:40 -0500 | edited answer | Incorrect opening a urdf file in Gazebo Hi.@RDaneelOlivaw Thank you so much. As you said, I updated the urdf model. When I started my old launch file, my car w |
| 2018-01-08 15:31:35 -0500 | edited answer | Incorrect opening a urdf file in Gazebo Hi.@RDaneelOlivaw Thank you so much. As you said, I updated the urdf model. When I started my old launch file, my car w |
| 2018-01-08 15:22:24 -0500 | edited question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf |
| 2018-01-08 15:17:21 -0500 | answered a question | Incorrect opening a urdf file in Gazebo Hi.@RDaneelOlivaw Thank you so much. As you said, I updated the urdf model. When I started my old launch file, my car w |
| 2018-01-08 15:17:03 -0500 | commented answer | Incorrect opening a urdf file in Gazebo Hi.@RDaneelOlivaw Thank you so much. I have tried the suggestion that you have given, as I reached the maximum length o |
| 2018-01-07 14:21:44 -0500 | received badge | ● Notable Question (source) |
| 2018-01-07 08:00:17 -0500 | received badge | ● Popular Question (source) |
| 2018-01-07 05:22:41 -0500 | commented question | Incorrect opening a urdf file in Gazebo Mr. @jayess I prepared my question. Could you please look at my problem now ? |
| 2018-01-07 05:21:01 -0500 | edited question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf |
| 2018-01-07 05:21:01 -0500 | received badge | ● Editor (source) |
| 2018-01-07 02:53:45 -0500 | edited question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf |
| 2018-01-07 02:39:57 -0500 | asked a question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urdf |
| 2018-01-07 02:39:56 -0500 | asked a question | Incorrect opening a urdf file in Gazebo Incorrect opening a urdf file in Gazebo Hi everyone. I created a .URDF from SolidWorks using SW2URDF plugin. This urd |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.