The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2019-05-16 06:55:50 -0500 | received badge | ● Self-Learner (source) |
| 2019-05-16 06:55:50 -0500 | received badge | ● Teacher (source) |
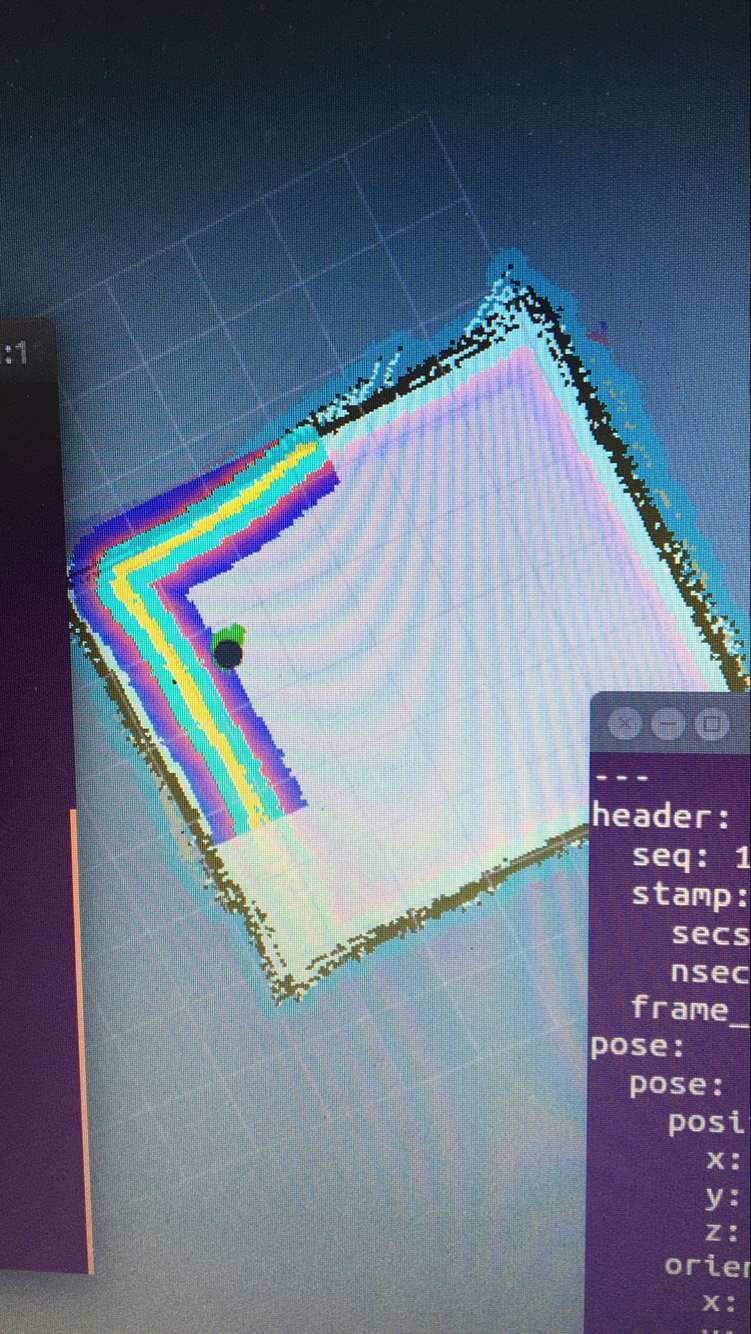
| 2018-08-08 01:58:15 -0500 | marked best answer | Turtlebot_navigation issue:local_map drifts after a long-distance movement. I want to upload some pictures to show my problem, but I don't have enough points. Therefore, I can only explain it with my poor English. Sorry. I am using a turtlebot2 to do my experiments. It worked well for a long time. But this Monday, after I built a new map or maybe after I decrease the max_vel_x, I found it can not locate itself well any more. I usually start my turtlebot2 at the same position as the position that I start to gmapping. At first, the local_map can match the static map well. But if I send a goal that is a long-distance away, the local_map would drift. Then the local_map can not match the static map well with not only distance but also orientation. I have tried everthing I can think out to fix it, but none of them worked. Need help~~ The map is a big rectangle, about 6m*6m.
I can upload now.
|
| 2018-08-07 11:03:46 -0500 | edited answer | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed It is the most feasible way to reinstall the whole ubuntu. The key operation is to update the ubuntu to the latest. Ther |
| 2018-08-07 11:02:47 -0500 | edited answer | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed It is the most feasible way to reinstall the whole ubuntu. The key operation is to update the ubuntu to the latest. Ther |
| 2018-08-07 10:59:53 -0500 | answered a question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed It is the most feasible way to reinstall the whole ubuntu. The key operation is to update the ubuntu to the latest. Ther |
| 2018-08-07 10:58:00 -0500 | commented question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed For more details to view this web page. link text |
| 2018-08-07 10:56:23 -0500 | commented question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed It is the most feasible way to reinstall the whole ubuntu. The key operation is to update the ubuntu to the latest. Ther |
| 2018-08-01 21:38:25 -0500 | commented question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed Hi, I have solved this issue. Once you have meet the error , you can only reinstall system, then follow the installation |
| 2018-08-01 21:38:02 -0500 | commented question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed Hi, I have solved this issue. Once you have meet the error , you can only reinstall system, then follow the installation |
| 2018-08-01 14:52:30 -0500 | commented question | Problem insatlling ROS indigo in ubuntu 14.04: python-catkin-pkg is not getting installed The same. It may be Ubuntu 14.04's problem.See this link text |
| 2018-08-01 02:57:42 -0500 | commented question | single rosmaster multi-turtlebots 2 Hello. I have tried it. My worry is right, because the tf trees on different turtlebot is the same , when I launch the s |
| 2018-08-01 02:54:19 -0500 | commented question | single rosmaster multi-turtlebots 2 Hello. I have tried it. My worry is right, because the tf trees on different turtlebot is the same , when I launch the s |
| 2018-08-01 02:51:29 -0500 | commented question | single rosmaster multi-turtlebots 2 Hello. I have tried it. My worry is right, because the tf trees on different turtlebot is the same , when I launch the s |
| 2018-07-31 19:33:08 -0500 | commented question | single rosmaster multi-turtlebots 2 I can also teleop them by roslaunch turtlebot_teleop keyboard_teleop.launch under different ROS_NAMESPACE. I am trying t |
| 2018-07-31 19:32:01 -0500 | commented question | single rosmaster multi-turtlebots 2 I can also teleop them by roslaunch turtlebot_teleop keyboard_teleop.launch under different ROS_NAMESPACE. I am trying t |
| 2018-07-31 19:27:27 -0500 | commented question | single rosmaster multi-turtlebots 2 Thank you for your advice, I have successfully implemented multi-master with multimaster_fkie. As my turtlebot is not th |
| 2018-07-31 19:27:27 -0500 | received badge | ● Commentator |
| 2018-07-31 03:02:40 -0500 | commented question | single rosmaster multi-turtlebots 2 It is really good to know someone has done it. Could please help me to ask the other engineers what are their solutions? |
| 2018-07-30 23:29:04 -0500 | commented question | single rosmaster multi-turtlebots 2 So you have done this problem at last? Thank you very much for giving the advice and hope. |
| 2018-07-30 22:58:40 -0500 | commented question | Why tf trees for multi-robot system not showing? Hi,I am trying to run multi turtlebots on one master. Have you solved this problem? I wonder how did you make your tf t |
| 2018-07-30 08:07:20 -0500 | commented question | single rosmaster multi-turtlebots 2 Hello, I wonder if you have solved this problem? If so, please tell me how to do it, I am dealing with the same problem |
| 2018-07-28 11:40:29 -0500 | commented question | Multiple Robot Navigation I wonder if you have done this?Let me know,please. |
| 2018-07-28 11:39:23 -0500 | received badge | ● Famous Question (source) |
| 2018-07-28 11:37:38 -0500 | answered a question | Multiple Robot Navigation I wonder if you have done this?Let me know,please. |
| 2018-03-29 19:42:52 -0500 | commented answer | What is "Rolling Window" used for? Can I increase the size of rolling window to help the robot locate itself better? |
| 2018-03-28 10:23:09 -0500 | received badge | ● Notable Question (source) |
| 2018-03-28 07:29:24 -0500 | answered a question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. I did this and the turtlebot2 behaved better, but still not good enough. |
| 2018-03-27 02:34:49 -0500 | received badge | ● Popular Question (source) |
| 2018-03-26 22:09:56 -0500 | commented question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. No,the map is the same as it was at last week and it worked well. This problem appeared just yesterday. |
| 2018-03-26 22:03:15 -0500 | edited question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. Turtlebot_navigation issue:local_map drifts after a long-distance movement. I want to upload some pictures to show my pr |
| 2018-03-26 21:36:42 -0500 | marked best answer | How to send hex type data to the serial port using wjwwood_serial in ros? I am trying to connect a VOC sensor in ROS via RS485 communication port.
I opened the port with serial package downloaded form wjwwood.com now.
Then I defined a char array And here are the results I received. |
| 2018-03-26 21:35:04 -0500 | marked best answer | Question about sending simple goal to navigation stack. I read this answer about how to publish /move_base_simple/goal. But I want to do something further. Here is my current setup: First ran: then I try to publish the goals: The robot moved. Then I tried to do something further, so I wrote a node to publish the msg. Here is my code. After actkin_make, I rosrun it, but something wired happened. Here is the result: But the turtlebot2 is still. Then I cancel the process by "ctrl+c", the turtlebot2 moved. So, I am confused. Could anyone please tell me how to publish a msg through a node to send simple goal to make my turtlebot2 move? Sorry for my poor English. |
| 2018-03-26 21:34:52 -0500 | received badge | ● Famous Question (source) |
| 2018-03-26 21:34:52 -0500 | received badge | ● Notable Question (source) |
| 2018-03-26 21:19:46 -0500 | edited question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. Turtlebot_navigation issue:local_map drifts after a long-distance movement. I want to upload some pictures to show my pr |
| 2018-03-26 21:19:45 -0500 | edited question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. Turtlebot_navigation issue:local_map drifts after a long-distance movement. I want to upload some pictures to show my pr |
| 2018-03-26 21:19:45 -0500 | received badge | ● Editor (source) |
| 2018-03-26 21:02:22 -0500 | received badge | ● Organizer (source) |
| 2018-03-26 20:57:40 -0500 | asked a question | Turtlebot_navigation issue:local_map drifts after a long-distance movement. Turtlebot_navigation issue:local_map drifts after a long-distance movement. I want to upload some pictures to show my pr |
| 2018-03-14 03:26:32 -0500 | received badge | ● Enthusiast |
| 2018-03-10 00:31:37 -0500 | received badge | ● Famous Question (source) |
| 2018-03-06 07:02:10 -0500 | received badge | ● Supporter (source) |
| 2017-11-20 01:16:38 -0500 | received badge | ● Notable Question (source) |
| 2017-11-16 08:15:37 -0500 | received badge | ● Popular Question (source) |
| 2017-11-16 05:58:11 -0500 | answered a question | Question about sending simple goal to navigation stack. I added ros::Duration d(5); before loop_rate.sleep(); It works. |
| 2017-11-16 05:56:35 -0500 | commented question | Question about sending simple goal to navigation stack. Thank you! It is exactly the reason what you say. |
| 2017-11-15 21:52:10 -0500 | asked a question | Question about sending simple goal to navigation stack. Question about sending simple goal to navigation stack. I read this answer about how to publish /move_base_simple/goal. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.