The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-07-12 10:24:44 -0500 | commented question | How to extract pose/trajectory data from cartographer? angle of orientation of the robot |
| 2017-07-09 14:13:34 -0500 | commented question | How to extract pose/trajectory data from cartographer? I extracted timestamps, positions and bearings from each implementation to .csv format and plotted them via matlab |
| 2017-05-24 11:56:09 -0500 | received badge | ● Famous Question (source) |
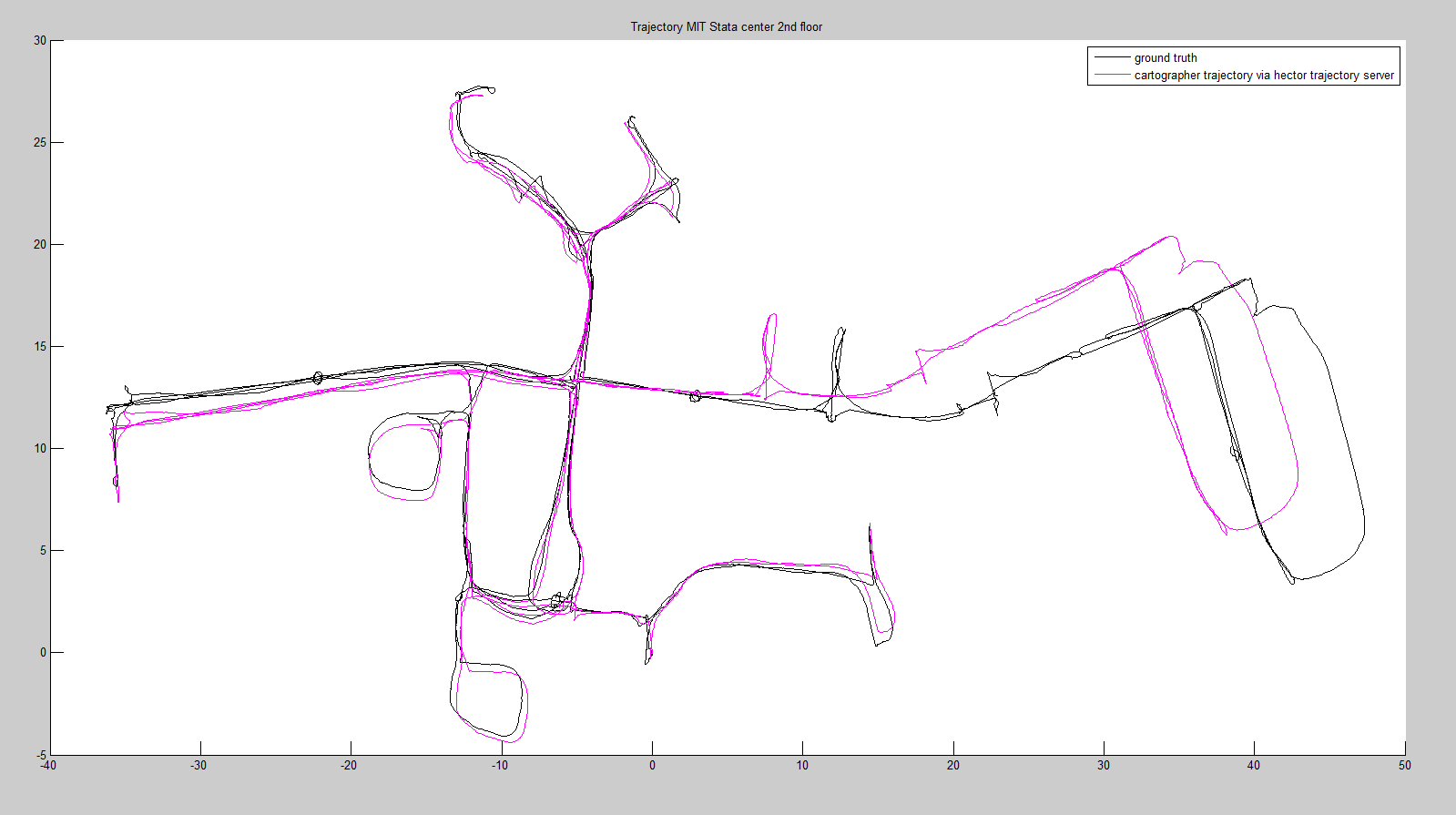
| 2017-05-18 18:14:40 -0500 | marked best answer | How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throughout their trajectory in my thesis and I can't come up with a way to get a trajectory from cartographer. I use .bag data with ground truth from MIT Stata center (link below). Currently I'm obtaining trajectory via hector trajectory server and it worked fine with both Hector SLAM and gMapping but Cartographers trajectory is quite off
This is from run at 0.2 speed. When I run it at realtime and robot is coming back from that part "north" to the main long hall (that part that looks like two curved horns) back that long hall to go "east" it simply skips like this
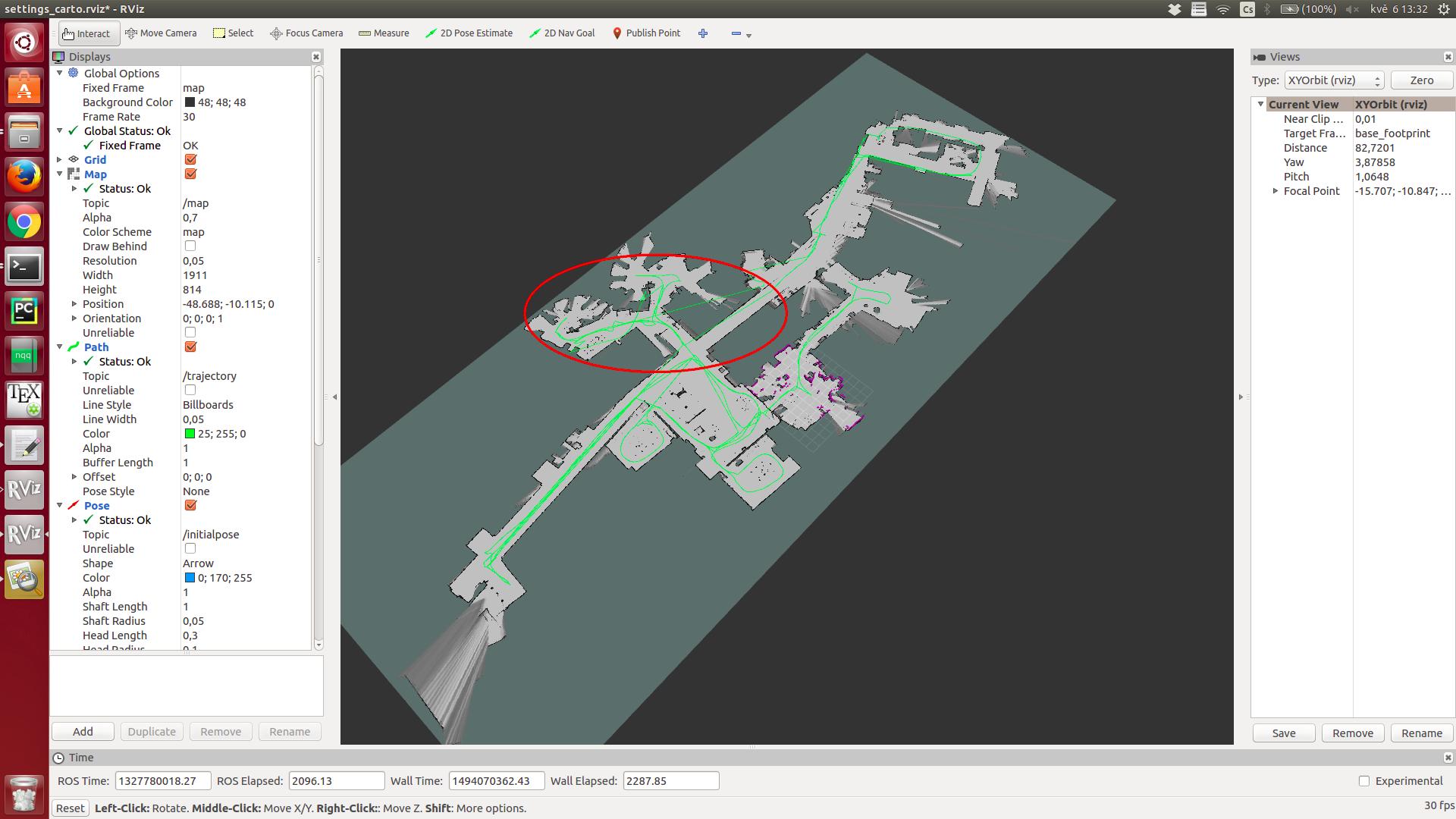
I believe there is some wild computing when cartographer is closing the loop from that "north" part which is not compatible with hector trajectory server. I also hope that I have right settings for cartographer because map on the outcome is correct. source code: http://ge.tt/9exBp2k2 used bag: 2012-01-28-11-12-01.bag.noimages (in ground truth) at http://projects.csail.mit.edu/stata/d... Thanks for any feedback in advance. cartographer.launch config.lua trajectory_builder_2d.lua sparse_pose_graph.lua |
| 2017-05-18 18:14:40 -0500 | received badge | ● Scholar (source) |
| 2017-05-18 18:14:33 -0500 | answered a question | How to extract pose/trajectory data from cartographer? Solved here: https://github.com/googlecartographer/cartographer_ros/issues/332 |
| 2017-05-14 23:14:52 -0500 | received badge | ● Student (source) |
| 2017-05-14 03:59:11 -0500 | received badge | ● Enthusiast |
| 2017-05-10 15:38:36 -0500 | received badge | ● Notable Question (source) |
| 2017-05-10 11:47:50 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-10 05:50:04 -0500 | received badge | ● Popular Question (source) |
| 2017-05-10 05:39:05 -0500 | commented question | How to extract pose/trajectory data from cartographer? About images: when I use the provided tag"alt text(/path/img.jpg "title")" (with ! and []) I can't see the image and I d |
| 2017-05-10 05:38:33 -0500 | commented question | How to extract pose/trajectory data from cartographer? About images: when I use the provided tag "!--alt text" I can't see the image and I don't have any restricted characters |
| 2017-05-10 05:38:20 -0500 | commented question | How to extract pose/trajectory data from cartographer? About images: when I use the provided tag "! alt text" I can't see the image and I don't have any restricted characters |
| 2017-05-10 05:38:05 -0500 | commented question | How to extract pose/trajectory data from cartographer? About images: when I use the provided tag "" I can't see the image and I don't have any restricted characters in the pat |
| 2017-05-10 05:37:50 -0500 | commented question | How to extract pose/trajectory data from cartographer? About images: when I use the provided tag "" I can't see the image and I don't have any restricted characters in the pat |
| 2017-05-10 05:33:38 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-10 05:25:04 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-10 05:15:40 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-10 05:14:19 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-10 05:14:19 -0500 | received badge | ● Editor (source) |
| 2017-05-10 05:12:26 -0500 | edited question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
| 2017-05-09 17:11:53 -0500 | asked a question | How to extract pose/trajectory data from cartographer? How to extract pose/trajectory data from cartographer? Hello, I am comparing SLAM algorithms based on their poses throug |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.