The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-11-13 23:12:36 -0500 | received badge | ● Good Question (source) |
| 2018-04-18 15:34:05 -0500 | received badge | ● Nice Question (source) |
| 2018-02-17 23:39:00 -0500 | received badge | ● Guru (source) |
| 2018-02-17 23:39:00 -0500 | received badge | ● Great Answer (source) |
| 2017-10-12 22:45:48 -0500 | edited answer | Does ros have some package that can provide linear and circular interpolation Linear interpolation for tool space movements is often accomplished by using the “Linear Segments with Parobolic Blends” |
| 2017-10-12 22:45:05 -0500 | edited answer | Does ros have some package that can provide linear and circular interpolation Linear interpolation for tool space movements is often accomplished by using the “Linear Segments with Parobolic Blends” |
| 2017-10-12 22:44:24 -0500 | edited answer | Does ros have some package that can provide linear and circular interpolation Linear interpolation for tool space movements is often accomplished by using the “Linear Segments with Parobolic Blends” |
| 2017-10-12 21:52:45 -0500 | answered a question | Does ros have some package that can provide linear and circular interpolation Linear interpolation for tool space movements is often accomplished by using the “Linear Segments with Parobolic Blends” |
| 2017-08-28 14:41:25 -0500 | commented answer | Complete coverage path planning ros @Aureus: I used the rviz markers found at http://wiki.ros.org/rviz/DisplayTypes/Marker . Sorry, I can not release the so |
| 2017-08-15 18:23:08 -0500 | received badge | ● Commentator |
| 2017-08-15 18:23:08 -0500 | commented question | What does setEndEffectorLink (from moveit::planning_interface) do? I have the same issue. Did you figure out what was going on? |
| 2017-07-28 09:25:20 -0500 | commented question | Quaternion.Slerp vs Quaternion.RotateTowards [Unity3D API vs ROS API] Did you ever determine how these two methods are different, or did you get slerp to work for your application? |
| 2017-05-15 21:43:48 -0500 | commented question | Teb local planner gets stuck at local minimum .... algorithm in the remaining area. I plan to add this feature, but it'll be awhile before I am on that project again. |
| 2017-05-15 21:43:35 -0500 | commented question | Teb local planner gets stuck at local minimum .... algorithm in the remaining area. I plan to add this feature, but it'll be a while before I am on that project again |
| 2017-05-15 20:54:55 -0500 | commented question | Teb local planner gets stuck at local minimum .... algorithm in the remaining area. |
| 2017-05-15 20:54:26 -0500 | commented question | Teb local planner gets stuck at local minimum My current algorithm requires a complete 2d map of the desired environment to plan the path. This map can be found using |
| 2017-05-15 06:54:30 -0500 | commented question | Teb local planner gets stuck at local minimum I apologize but I can not make my code public at this time because it is for a private company. |
| 2017-05-15 06:54:15 -0500 | commented question | Teb local planner gets stuck at local minimum I apologize but I can not make my code public at this time because it is for a private company. |
| 2017-05-15 06:52:35 -0500 | commented question | Teb local planner gets stuck at local minimum I have described my process here: http://answers.ros.org/question/212614/complete-coverage-path-planning-ros/#255555. Th |
| 2017-05-15 06:47:47 -0500 | commented answer | Complete coverage path planning ros I am very sorry, but i have moved on from this project for now and it turned out to be harder then I expected to get my |
| 2017-05-04 08:18:42 -0500 | commented answer | Complete coverage path planning ros Yes, I think I can do that. Could you attach some links that'll get me to the maps you are interested in? |
| 2017-03-29 05:28:22 -0500 | received badge | ● Famous Question (source) |
| 2017-03-18 18:44:04 -0500 | received badge | ● Enlightened (source) |
| 2017-03-03 13:27:36 -0500 | received badge | ● Enthusiast |
| 2017-03-02 15:44:43 -0500 | received badge | ● Notable Question (source) |
| 2017-03-02 13:27:11 -0500 | commented question | Teb local planner gets stuck at local minimum Thank you. I attached my configuration file with comments for you so hopefully my goals/reasoning are clear. is the strict point ordering you mentioned via_points_ordered? If so, currently it does not solve the issue. I would like a longer horizon, but that seems to find local minim worse.. |
| 2017-03-02 02:20:26 -0500 | received badge | ● Popular Question (source) |
| 2017-02-28 21:53:57 -0500 | received badge | ● Student (source) |
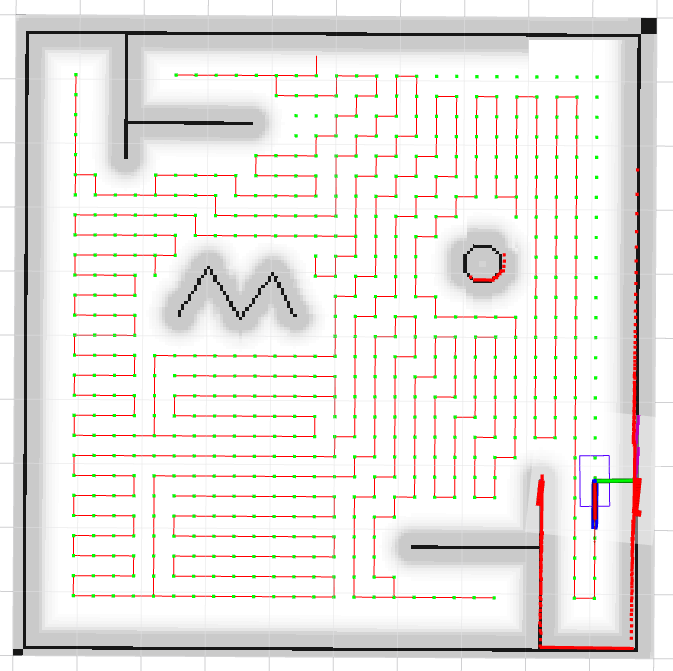
| 2017-02-28 21:51:07 -0500 | asked a question | Teb local planner gets stuck at local minimum I have written a full-coverage global path planner plug-in, which returns a "raster" pattern shown below. To follow this path, I am using teb_local_planner's (TEB) path following ability. When i first applied TEB, the local planner would find a local minimum at the first cut-back (turning section in the back and forth pattern) it came to and would simply stay there and oscillate. To solve this, i reduced the prune path parameter (which i found in a header file) from 1m to 0.1m. This solved the issue very well. Also, i had to be sure that TEB would never request a new global plan so i edited out all re-planning requests. My current issue is that sometimes segments of the global plan requires the robot to go down a dead end path segment, turn, and return exactly how it came. In this scenario TEB always finds a local minimum at this path end and gets stuck. I have to bump the robot forward to get out of this situation. Does anyone know how i can resolve this? Perhaps removing way-points within the local region (not sure how/where to do this)? or some new weight parameter? Thank you in advance. My system is ROS Kinetic and Ubuntu 16.04. Edit: here is my teb_local_planner configuration. |
| 2017-02-27 11:02:59 -0500 | received badge | ● Editor (source) |
| 2017-02-27 09:07:46 -0500 | received badge | ● Good Answer (source) |
| 2017-02-25 22:52:15 -0500 | received badge | ● Nice Answer (source) |
| 2017-02-25 10:55:58 -0500 | received badge | ● Necromancer (source) |
| 2017-02-25 10:55:58 -0500 | received badge | ● Teacher (source) |
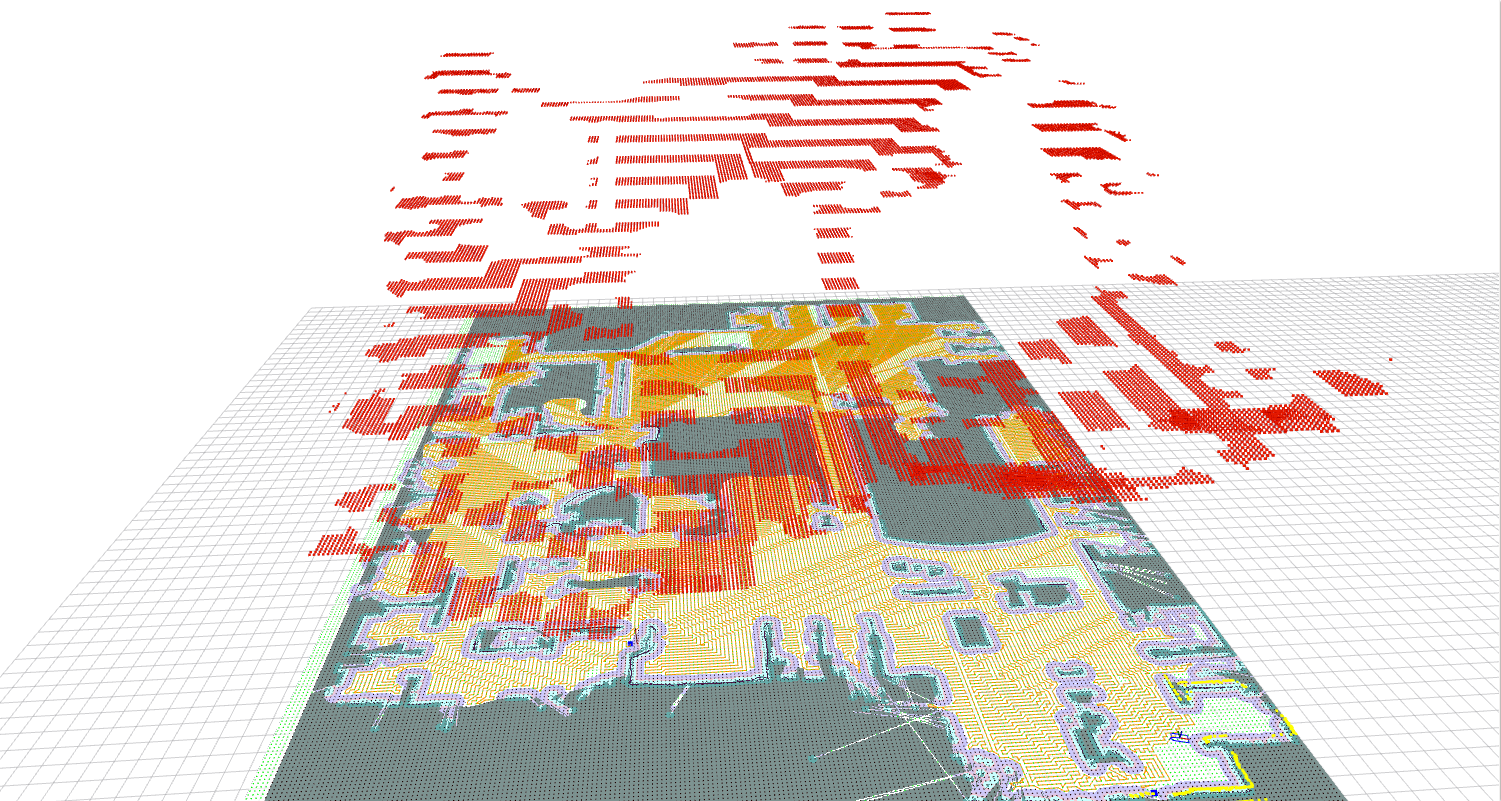
| 2017-02-24 13:20:18 -0500 | answered a question | Complete coverage path planning ros For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well: ( https://scholar.google.com/scholar?q=... ) The global planner algorithm steps are: 1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells 2) Identify the closest cells to the desired start and end pose 3) Use a wavefront algorithm to assign the distance transform value at each cell 4) Iterate through these cells in a path of slowest decent as described in the paper Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma... EDIT: Thank you for the karma! This image shows the full coverage path in yellow covering most of the willow garage map. I have included the z-axis to shed some light on the algorithm. the red points represent the distance transform cost of every free cell (higher=more cost), and the planner plans the slowest decent down this gradient funnel. Note the lowest area is the goal point.
|
| 2017-02-22 23:27:58 -0500 | commented answer | Clearing of obstacle layer in the layered_costmap I am also writing a full coverage planner. The move_base clear_costmaps service works well from the terminal. However, the method shown above halts my global plugin code at "clear_costmaps_client.call(srv)" . it doesn't crash, just doesn't continue. Any ideas? i have Ubuntu 16.04 and Kinetic. Thanks |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.