The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-04-25 20:19:37 -0500 | received badge | ● Famous Question (source) |
| 2016-04-09 15:23:05 -0500 | received badge | ● Notable Question (source) |
| 2016-04-08 14:20:47 -0500 | received badge | ● Popular Question (source) |
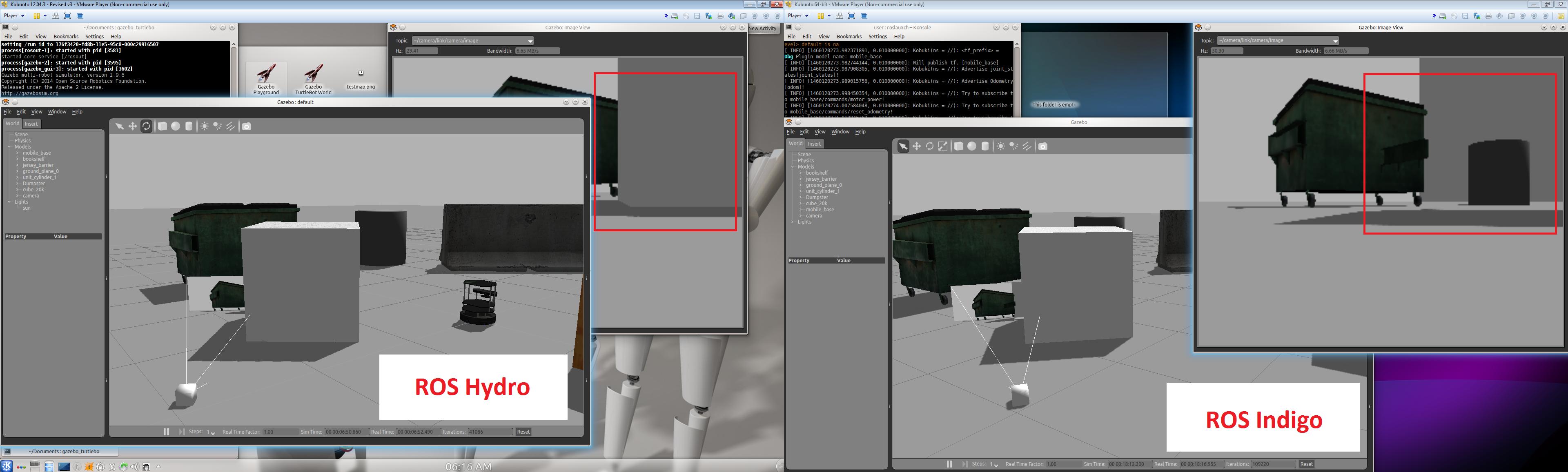
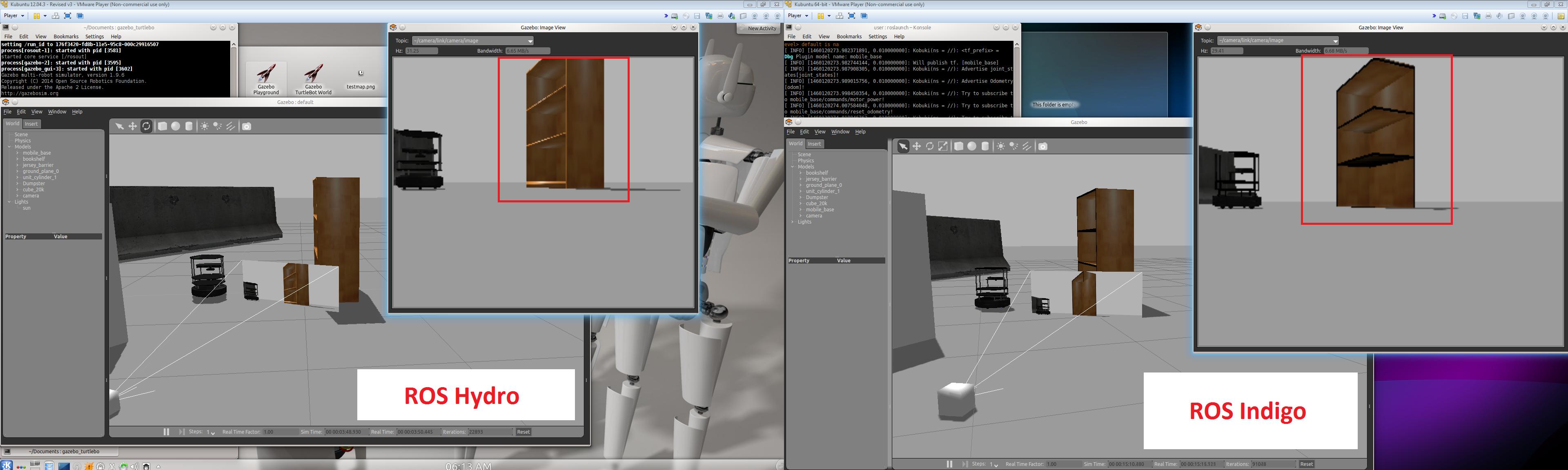
| 2016-04-08 10:03:15 -0500 | asked a question | Gazebo camera plugin rendering in wrong order on Virtual Machine We are using ROS & Gazebo over virtual machine (VMWare Player). The Gazebo camera rendering worked fine in the Gazebo shipped with ROS Hydro. But in Gazebo version shipped with ROS Indigo, the camera plugin is rendering objects in the wrong order. See images here and here.
This problem appears to only happen on Virtual Machines (VMWare Player). This has been reported previously here. It is important for us to work within Virtual Machine, and because ROS Indigo is an LTS release, we would like to upgrade to ROS Indigo. Is there any solution or workaround for this bug? |
| 2012-11-05 09:08:51 -0500 | received badge | ● Famous Question (source) |
| 2012-11-05 09:08:51 -0500 | received badge | ● Popular Question (source) |
| 2012-11-05 09:08:51 -0500 | received badge | ● Notable Question (source) |
| 2012-10-26 07:09:46 -0500 | commented question | Vicon with ROS Fuerte and Ubuntu 12.04 I am also facing similar issue along with another friend of mine. Has there been any progress in locating the issue and is any hope of solving it? I tried methods suggested by others below but did not work either. Thinking of downgrading Ubuntu and ROS versions. The problem started after upgrading. |
| 2012-07-24 16:25:54 -0500 | answered a question | DC Motor with Rosserial help Go to my site: https://www.sites.google.com/site/shridharshah/projects/ros-arduino-xbee I have done exactly what you need. I have provided full documentation. Let me know if any questions. |
| 2012-07-24 10:02:52 -0500 | commented answer | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? From your example, what i am getting is I can create an object of PlayerDriver class inside a small ros publisher subscriber program and call its methods in a sequence that Player will follow? Am I correct? |
| 2012-07-24 09:53:04 -0500 | commented answer | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? I might have to spend a lot of time to convert client controller to ROS. Initially I was trying the same, but its a large code written by someone else in my lab. I thought writing a player driver will be an easier task. Is there a way to email you my driver? Can you look at my code? |
| 2012-07-24 08:24:20 -0500 | commented answer | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? The robot driver is in ROS but the client controller is written using player for an old robot. I am just taking a short-cut by not writing the client controller again using ROS. Instead I am writing this "erratic_Player" type driver to use position2dmsgs from player client and publish for ROS robot. |
| 2012-07-24 08:07:25 -0500 | commented answer | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? Ok, what I am trying to do is exactly same as erratic_player ...however, at a smaller scale, as I have no sensors, just Position2d interface. An easier method will help but I am also looking at erratic_player.cpp to find solution. |
| 2012-07-24 08:01:14 -0500 | commented question | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? What I am trying to write is this "Simulated Robot with Player driver" which will allow a player client to subscribe with Position2d. The client can send Position2d msgs to simulated robot. Now, I want to put ROS Publisher in this "simulated player robot". Hope I was able explained my problem. |
| 2012-07-24 07:51:23 -0500 | received badge | ● Student (source) |
| 2012-07-24 07:44:05 -0500 | commented question | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? Player server (also known as Player Plugin). Please see following link http://psurobotics.org/wiki/index.php?title=Writing_a_Player_Plugin |
| 2012-07-24 07:18:22 -0500 | commented question | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? Thanks @allenh1 for the reply. I saw your example, Robot class. I think here the Player is a client. I am trying to create a Player server. Do you think I can create a class as you have suggested? I have had no problem integrating a player client with ROS publisher/subscriber. |
| 2012-07-24 06:32:18 -0500 | asked a question | Can I call ROS “ros::init(…)” within the player (Player/Stage) driver? I am trying to write a Player driver that will publish messages on ROS. Player driver does not create an executable file and hence I am not sure how to call ROS initialize within the player driver. The main function of player driver looks like this... The Player driver compiles and creates a shared library and I have a cfg file. It is called by "player playerdriver.cfg" and works fine, gets connected to a Player Client but it does not publish messages on ROS. As the Player Main() method does not take arguments, I believe this is where I am doing some mistake. Any suggestions are welcome. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.