The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2015-10-26 21:44:11 -0500 | received badge | ● Famous Question (source) |
| 2015-10-01 02:38:51 -0500 | received badge | ● Enthusiast |
| 2015-09-30 07:03:12 -0500 | received badge | ● Notable Question (source) |
| 2015-09-30 05:52:26 -0500 | answered a question | Node synchronization Is it maybe sufficient, if you specify the desired timestamp in the message headers, rather than the actual generation time (I guess you would use For B, synchronizing with the desired timestamp is easier and avoids using |
| 2015-09-30 05:32:05 -0500 | received badge | ● Popular Question (source) |
| 2015-09-30 05:32:00 -0500 | received badge | ● Editor (source) |
| 2015-09-30 05:21:36 -0500 | commented answer | rtabmap barely finds features in simulated stereo image When I understand you right, the features can be filtered out by their depth value. I wonder if my features disappear simply because their depth may be hard to determine. The disparity map contains many undefined pixels... |
| 2015-09-30 05:15:39 -0500 | commented answer | rtabmap barely finds features in simulated stereo image My baseline according to right/camera_info is 0.4m, which matches my robot's configuration. The building is about 30m long.
Settling |
| 2015-09-29 06:33:36 -0500 | commented question | rtabmap stereo+bumblebee2 Exit code -6 might be an assertion error. Maybe you should post the screen outputs and log file contents. |
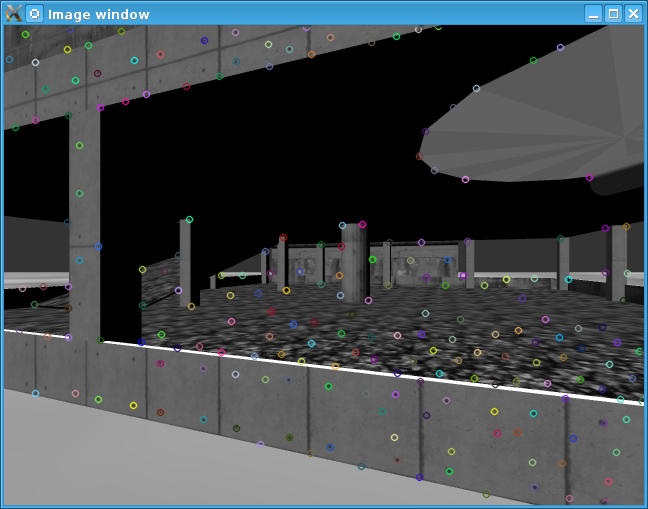
| 2015-09-29 02:50:44 -0500 | asked a question | rtabmap barely finds features in simulated stereo image I am using The problem is that too few (mostly not even one) features are found in my camera images. Which is confusing me, since my own implementation of GFTT finds plenty of features in the same images. Am I getting anything wrong? Are there more requirements on the visual features for rtabmap for visual odometry? Considering the following setup, where I am using GFTT feature detector: The output of However, my own implementation of GFTT in OpenCV using the same parameters finds a plenty of features. The following image shows the features from my implementation. The same image was fed into the
Edit: Example output of Edit2 : Here is an example disparity map of my scene: https://goo.gl/photos/6SPKukujRP6fBQpLA Edit3 : example bag file: https://drive.google.com/file/d/0B_p8... |
| 2015-06-08 04:35:59 -0500 | received badge | ● Teacher (source) |
| 2015-06-08 04:35:59 -0500 | received badge | ● Necromancer (source) |
| 2015-04-15 03:56:28 -0500 | answered a question | Segfault on roslaunch rgbdslam - PCL 1.7 related Using libpcl-1.7.1 works for me. I have downloaded and installed it from source: https://github.com/PointCloudLibrary/... In rgbdslam's CMakeLists.txt change to |
| 2015-04-14 09:40:53 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.