The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2023-04-18 05:52:13 -0500 | received badge | ● Notable Question (source) |
| 2023-04-15 01:57:51 -0500 | received badge | ● Notable Question (source) |
| 2023-03-28 08:21:17 -0500 | commented question | SLAM Toolbox Mapping Problem I'm tracking this issue which covers this https://github.com/turtlebot/turtlebot4/issues/62 I've not had a chance to ch |
| 2023-03-28 07:47:45 -0500 | received badge | ● Famous Question (source) |
| 2023-03-28 07:43:05 -0500 | commented question | laser_scan_matcher error Just looked at https://github.com/SICKAG/sick_scan/blob/master/launch/sick_nav_3xx.launch. Do you get the same issue if |
| 2023-03-27 16:32:14 -0500 | commented question | laser_scan_matcher error Hi, My guess is that this has something to do with the driver for the scanner. There are a number of similar issues: e |
| 2023-03-27 16:31:57 -0500 | commented question | laser_scan_matcher error Hi, My guess is that this has something to do with the driver for the scanner. There are a number of similar issues: e |
| 2023-03-07 07:32:03 -0500 | commented question | depth_image_raw impossibly slow across machines (wireless) Thanks for that. Next port of call I think I'll get a new WiFi adapter. Possibly look at the compression to. The WiFi a |
| 2023-03-07 04:57:18 -0500 | commented question | depth_image_raw impossibly slow across machines (wireless) Just run iperf in both directions from Robot to PC and back over 60 secs combined average about 34.3Mbits/sec. iwconfi |
| 2023-03-05 14:05:59 -0500 | commented question | depth_image_raw impossibly slow across machines (wireless) Thanks - I've updated the question with additional info. Checked other various WiFi stats - no dropped packets (noted: r |
| 2023-03-05 14:01:46 -0500 | edited question | depth_image_raw impossibly slow across machines (wireless) depth_image_raw impossibly slow across machines Hi, I've spun up realsense2_camera. Depth messages are being produced o |
| 2023-03-05 13:45:47 -0500 | received badge | ● Popular Question (source) |
| 2023-03-05 09:34:22 -0500 | received badge | ● Notable Question (source) |
| 2023-03-04 11:16:25 -0500 | asked a question | depth_image_raw impossibly slow across machines (wireless) depth_image_raw impossibly slow across machines Hi, I've spun up realsense2_camera. Depth messages are being produced o |
| 2023-01-22 18:46:18 -0500 | marked best answer | howto: Eigen Installation All, This is just a brief how to on how to resolve Eigen compile time errors - which wasn't installed on my Raspberry Pi. I kept getting the error: And try as I might I couldn't find a conclusive answer. Anyway these steps should solve the issue 1) Download Eigen 2) CD into the download dir 3) Create a build dir 4) Configure the build 5) Build the package 6) Install the package And all being well that should be it! Hope this helps Mark |
| 2023-01-22 18:46:18 -0500 | received badge | ● Nice Answer (source) |
| 2023-01-14 14:22:24 -0500 | received badge | ● Popular Question (source) |
| 2023-01-14 06:49:47 -0500 | commented answer | Possible to get ROS/Turtlebot to navigate through a doorway? okay will do later this w/e. At the moment I have the radius of the robot set to 10cm when it should really be 16 (it's |
| 2023-01-14 06:37:51 -0500 | commented answer | Possible to get ROS/Turtlebot to navigate through a doorway? okay will do later this w/e. At the moment I have the radius of the robot set to 10cm when it should really be 16 (it's |
| 2023-01-13 14:26:21 -0500 | commented question | Possible to get ROS/Turtlebot to navigate through a doorway? This is on a real robot |
| 2023-01-13 14:18:48 -0500 | commented answer | Possible to get ROS/Turtlebot to navigate through a doorway? Hi, Yep I've tried that - I'll have another go. What frustrating is that it all worked really well in Kinetic then upg |
| 2023-01-12 14:48:29 -0500 | asked a question | Possible to get ROS/Turtlebot to navigate through a doorway? Possible to get ROS/Turtlebot to navigate through a doorway? Hi, A seemingly obvious question - but regardless of what |
| 2022-07-03 07:21:36 -0500 | asked a question | Possible to get ROS/Turtlebot to navigate through a doorway? Possible to get ROS/Turtlebot to navigate through a doorway? Hi, A seemingly obvious question - but regardless of what |
| 2022-06-20 03:50:55 -0500 | received badge | ● Notable Question (source) |
| 2022-06-19 09:41:40 -0500 | received badge | ● Famous Question (source) |
| 2022-05-19 13:14:36 -0500 | commented question | Turtlebot4_msgs Build Issue TBH I've not idea what the problem was. Just ended up deleting the whole lot then seemed to work. On/Off/On scenario |
| 2022-05-08 08:58:15 -0500 | received badge | ● Notable Question (source) |
| 2022-05-08 00:15:45 -0500 | received badge | ● Popular Question (source) |
| 2022-05-06 12:01:10 -0500 | asked a question | Turtlebot4_msgs Build Issue Turtlebot4_msgs Build Issue Not quite sure what's wrong here. Well not yet anyway. Building turtlebot4 repo and getting |
| 2022-05-06 12:01:02 -0500 | asked a question | Turtlebot4_msgs Build Issue Turtlebot4_msgs Build Issue Not quite sure what's wrong here. Well not yet anyway. Building turtlebot4 repo and getting |
| 2022-04-12 01:51:54 -0500 | received badge | ● Famous Question (source) |
| 2022-04-12 01:51:54 -0500 | received badge | ● Popular Question (source) |
| 2022-04-12 01:51:54 -0500 | received badge | ● Notable Question (source) |
| 2022-03-29 14:16:52 -0500 | received badge | ● Popular Question (source) |
| 2022-03-28 04:55:04 -0500 | edited question | DWAPlannerROS - Forcing Reverse (Backing out of charging station) DWAPlannerROS - Forcing Reverse (Backing out of charging station) Hi, Another difference since upgrading to Noetic (Fro |
| 2022-03-28 03:49:52 -0500 | edited question | DWAPlannerROS - Forcing Reverse (Backing out of charging station) DWAPlannerROS - Forcing Reverse (Backing out of charging station) Hi, Another difference since upgrading to Noetic (Fro |
| 2022-03-28 03:48:19 -0500 | received badge | ● Popular Question (source) |
| 2022-03-28 00:16:28 -0500 | asked a question | DWAPlannerROS - Forcing Reverse (Backing out of charging station) DWAPlannerROS - Forcing Reverse (Backing out of charging station) Hi, Another difference since upgrading to Noetic (Fro |
| 2022-03-28 00:16:25 -0500 | asked a question | DWAPlannerROS - Forcing Reverse (Backing out of charging station) DWAPlannerROS - Forcing Reverse (Backing out of charging station) Hi, Another difference since upgrading to Noetic (Fro |
| 2022-03-19 23:57:54 -0500 | received badge | ● Notable Question (source) |
| 2022-03-19 10:56:40 -0500 | commented answer | Navigation Issues between Kinetic and Noetic Hi Mike thanks for that. Yes I'd already noticed this and updated them when I first ran the process (it was producing wa |
| 2022-03-19 10:55:35 -0500 | received badge | ● Popular Question (source) |
| 2022-03-19 05:18:56 -0500 | edited question | Navigation Issues between Kinetic and Noetic Navigation Issues between Kinetic and Noetic Hi, Hopefully someone can shed some light on this. I've recently done a ma |
| 2022-03-19 05:18:35 -0500 | asked a question | Navigation Issues between Kinetic and Noetic Navigation Issues between Kinetic and Noetic Hi, Hopefully someone can shed some light on this. I've recently done a ma |
| 2022-03-18 10:59:46 -0500 | commented question | gmapping and laser scanmatcher -Scan Matching Failed, using odometry I ended up changing to a Lidar and using Cartographer |
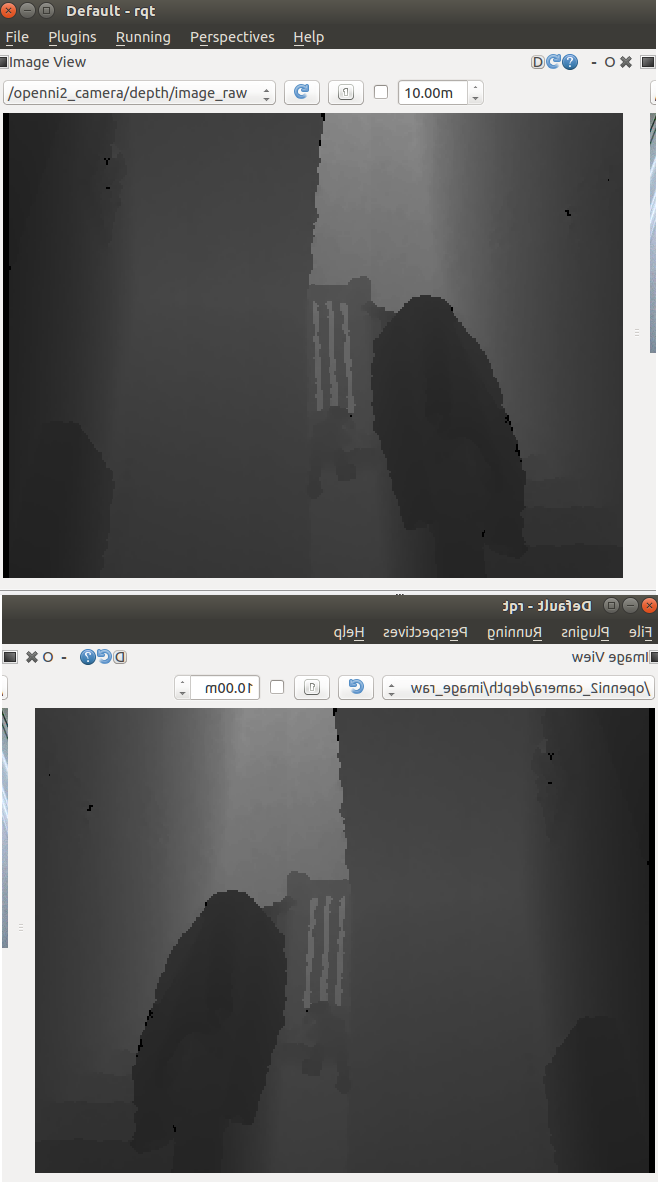
| 2022-02-15 18:54:06 -0500 | marked best answer | XTion/Openni2 image flipped Hi all, This will be a simple question I'm sure. Currently using XTIon running a openni2_camera_node. This depth and rgb images are coming through fine, but that flipped about the Y axis. Is there something I need to set to correct this? I am using the command below, with the resulting output. The last be is my modification to the code as it wasn't detecting the resolution on the pi The images below show the image streamed back as viewed in rqt (top) and bottom is how the scene really looks (I've flipped is manually)
Many Thanks Mark |
| 2022-02-15 18:54:06 -0500 | received badge | ● Nice Answer (source) |
| 2022-02-15 18:53:43 -0500 | received badge | ● Nice Question (source) |
| 2022-02-10 06:12:34 -0500 | received badge | ● Great Answer (source) |
| 2022-02-10 06:12:34 -0500 | received badge | ● Guru (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.