The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2015-06-18 09:14:20 -0500 | received badge | ● Famous Question (source) |
| 2015-05-22 02:27:10 -0500 | received badge | ● Notable Question (source) |
| 2014-12-01 18:08:49 -0500 | received badge | ● Famous Question (source) |
| 2014-10-20 06:52:09 -0500 | received badge | ● Self-Learner (source) |
| 2014-10-20 06:52:09 -0500 | received badge | ● Teacher (source) |
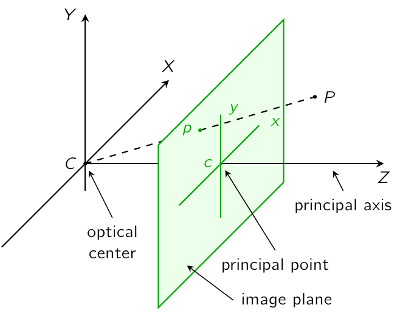
| 2014-10-20 06:46:34 -0500 | answered a question | Coordinates of a specific pixel in depthimage published by Kinect I was looking for the exact formula to calculate the real world X,Y,Z values by the depth image and finally I got it. First of all, it appears that the values in the depth image are not giving the distance between any point in the real world and the origin of the Kinect. It appears that it is the distance between the point and Kinect's XY plane (the plane which is parallel to the front surface of Kinect). So, if Kinect is looking at a wall, all the depth values give about the same value. It doesn't matter the real distance between a point on the wall and Kinect's origin. I found the calculations in the NuiSkeleton.h file: https://code.google.com/p/stevenhickson-code/source/browse/trunk/blepo/external/Microsoft/Kinect/NuiSkeleton.h?r=14 For the Z axis, in line 625, it says: You don't have to worry about the bitshift operation because in the description of the method it says: So, you can use the equation: the unit is in meters (because of the division by 1000). For X and Y axes, line 633 and 634 gives: The calculation of the Y axis starts with a minus sign because in a picture (like depth image) the Y value increases when you go down but in real world coordinates, conventionally, Y increases when you go up. For the NUI_CAMERA_DEPTH_IMAGE_TO_SKELETON_MULTIPLIER_320x240 constant, line 349 defines: a short Googling gives this page: http://msdn.microsoft.com/en-us/library/hh855368.aspx where it says So, using these formulas gives you the real world coordinates within the coordinate frame given in the image:
(ref: http://pille.iwr.uni-heidelberg.de/~kinect01/doc/reconstruction.html) |
| 2014-10-20 06:25:24 -0500 | received badge | ● Notable Question (source) |
| 2014-10-16 14:31:30 -0500 | received badge | ● Popular Question (source) |
| 2014-10-16 13:41:36 -0500 | received badge | ● Student (source) |
| 2014-10-15 09:55:14 -0500 | asked a question | Coordinates of a specific pixel in depthimage published by Kinect I am looking for an answer for hours and finally I am asking it here. I am using CMvision to find a specific color in Kinect's sight and I want to find the real world coordinates of the object with that color. I am planning to use CMvision to find the frame coordinates (as X and Y pixel values on the picture) and use these coordinates and the depth value of that pixel to calculate the real world coordinates. As I understand, /camera/depth_registered/points topic already gives the real world coordinate but I couldn't find how to retrieve the X,Y,Z values of a specific pixel that I've choosen on the depth (or RGB) image. Thanks in advance. |
| 2014-10-13 08:29:44 -0500 | received badge | ● Popular Question (source) |
| 2014-10-10 10:16:40 -0500 | received badge | ● Supporter (source) |
| 2014-10-10 10:16:34 -0500 | commented answer | Position of a point on expanding map of GMapping Thank you! It was so simple yet hidden :) I did some experiments and saw that the MapMetaData origin values change according to the expansion of the map and always give the real world coordinates of the bottom left corner of the map. |
| 2014-10-10 10:14:25 -0500 | received badge | ● Scholar (source) |
| 2014-10-10 04:38:27 -0500 | asked a question | Position of a point on expanding map of GMapping Hi, I am trying something and I need some help. I have two robots which are mapping the same environment by using separate GMapping algorithms and building separate maps. During the mapping process, I want to send the maps to a host computer time to time. On this host computer, I want to merge these maps but as you can guess, unless the maps have a large area of intersection, using ICP or a similar algorithm wont work. So I placed distinct landmarks in the environment (like the soccer playing robots use, cylinders with colored stripes) and I can detect them with the help of Kinect which enables me to know the position of the landmark relative to the robot. And with the help of GMapping, I know the position and orientation of the robot according to the map. The plan is, sending the seperate maps to the host with landmarks tagged on it and the host can easily match the position of the landmarks and merge the maps (with necessary translations, rotations and distortions if necessary). What my problem is, GMapping expands the map if it needs to. And coordinates of the points on the map change if that happens (I am planning to use the pgm files as maps but any other suggestions would be appreciated). How can I get the coordinates of the points and my robot on the map (with negative coordinates if necessary) relative to an absolute position (like the start position of the robot)? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.