The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-28 09:12:47 -0500 | received badge | ● Famous Question (source) |
| 2022-07-17 08:53:19 -0500 | received badge | ● Famous Question (source) |
| 2022-07-14 02:47:54 -0500 | marked best answer | Error smach_viewer in ROS noetic Hi,
I read the smach tutorial and there is no problem until I run smach_viewer command.
Smach tutorial The terminal shows the below error :
I checked the _/opt/ros/noetic/share_ path there is no smach_viewer package. just smach. the question is: What should I do to see the graphical representation of my smach code? I'm using ubuntu focal, Noetic ROS, and python3. thanks a lot for your support. |
| 2022-07-14 02:47:50 -0500 | answered a question | Error smach_viewer in ROS noetic It seems Smach lib is based on Python2 and ROS noetic is not supported by python2. So the lib of the Smach should change |
| 2022-07-14 02:46:11 -0500 | received badge | ● Notable Question (source) |
| 2022-07-14 02:46:11 -0500 | received badge | ● Popular Question (source) |
| 2022-07-06 01:21:08 -0500 | received badge | ● Enthusiast |
| 2022-07-05 03:53:56 -0500 | received badge | ● Nice Question (source) |
| 2022-07-05 03:53:43 -0500 | received badge | ● Necromancer (source) |
| 2022-07-05 03:53:43 -0500 | received badge | ● Self-Learner (source) |
| 2022-07-05 03:53:43 -0500 | received badge | ● Teacher (source) |
| 2022-07-05 02:58:37 -0500 | edited question | Error smach_viewer in ROS noetic Error smach_viewer in ROS noetic Hi, I read the smach tutorial and there is no problem until I run smach_viewer command. |
| 2022-07-05 02:57:40 -0500 | edited question | Error smach_viewer in ROS noetic Error smach_viewer in ROS noetic Hi, I read the smach tutorial and there is no problem until I run smach_viewer command. |
| 2022-07-05 02:56:44 -0500 | asked a question | Error smach_viewer in ROS noetic Error smach_viewer in ROS noetic Hi, I read the smach tutorial there is no problem until I run smach_viewer command. Sm |
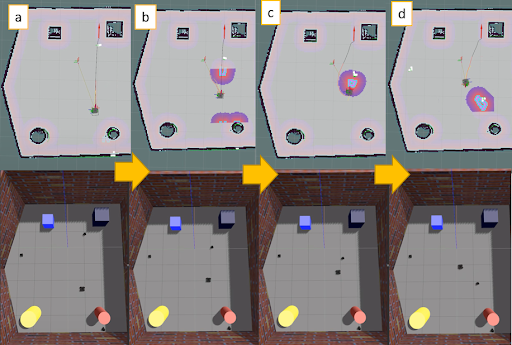
| 2022-07-05 02:30:55 -0500 | marked best answer | Customize the Local cost map Hi everyone, Based on the ROS tutorial I added a simple layer to the global map as a plugin. the question is, How can I customize the local cost map as I want? I attached a picture and I want to do the same. Based on the image, the shape of a dynamic obstacle is changing during navigation on the local cost map. Image link thank you for your support...
|
| 2022-07-05 02:30:55 -0500 | received badge | ● Scholar (source) |
| 2022-07-05 02:30:51 -0500 | answered a question | Customize the Local cost map I solved it. I just used the simple layer tutorial and add my code to create the custom shape as a local cost map. simpl |
| 2022-05-28 05:22:30 -0500 | received badge | ● Notable Question (source) |
| 2022-05-27 06:14:47 -0500 | received badge | ● Popular Question (source) |
| 2022-05-27 05:37:26 -0500 | commented question | Customize the Local cost map I added the image to the question. I want to do something like a picture... |
| 2022-05-27 05:33:10 -0500 | edited question | Customize the Local cost map Customize the Local cost map Hi everyone, Based on the ROS tutorial I added a simple layer to the global map as a plugi |
| 2022-05-27 05:33:10 -0500 | received badge | ● Editor (source) |
| 2022-05-27 05:32:34 -0500 | edited question | Customize the Local cost map Customize the Local cost map Hi everyone, Based on the ROS tutorial I added a simple layer to the global map as a plugi |
| 2022-05-25 12:20:25 -0500 | received badge | ● Student (source) |
| 2022-05-25 04:05:34 -0500 | asked a question | Customize the Local cost map Customize the Local cost map Hi everyone, Based on the ROS tutorial I added a simple layer to the global map as a plugi |
| 2022-05-25 04:05:34 -0500 | commented answer | Gmapping, How the initial frames assumed ? first, check the turtlebot3 odometry in the gazebo. for example, if you move the robot 1 meter the odometry should show |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.