
turtlesim tutorial produces incoherant pose in rqt_plot


Hi there,
I'm noticing some incoherent pose output when replaying a rosbag on the turtlesim. I run those nodes:
/rosout
/rqt_gui_py_node_8247
/teleop_turtle
/turtlesim
Then I record a rosbag with and then hit some keys to give the turtle a constant speed
$ rosbag record -a
Finally I replay it with
$ rosbag play 2013-09-27-18-49-00.bag
The Turtlesim behaves fine, but the matplot shows some weird results as you can see in this screenshot:
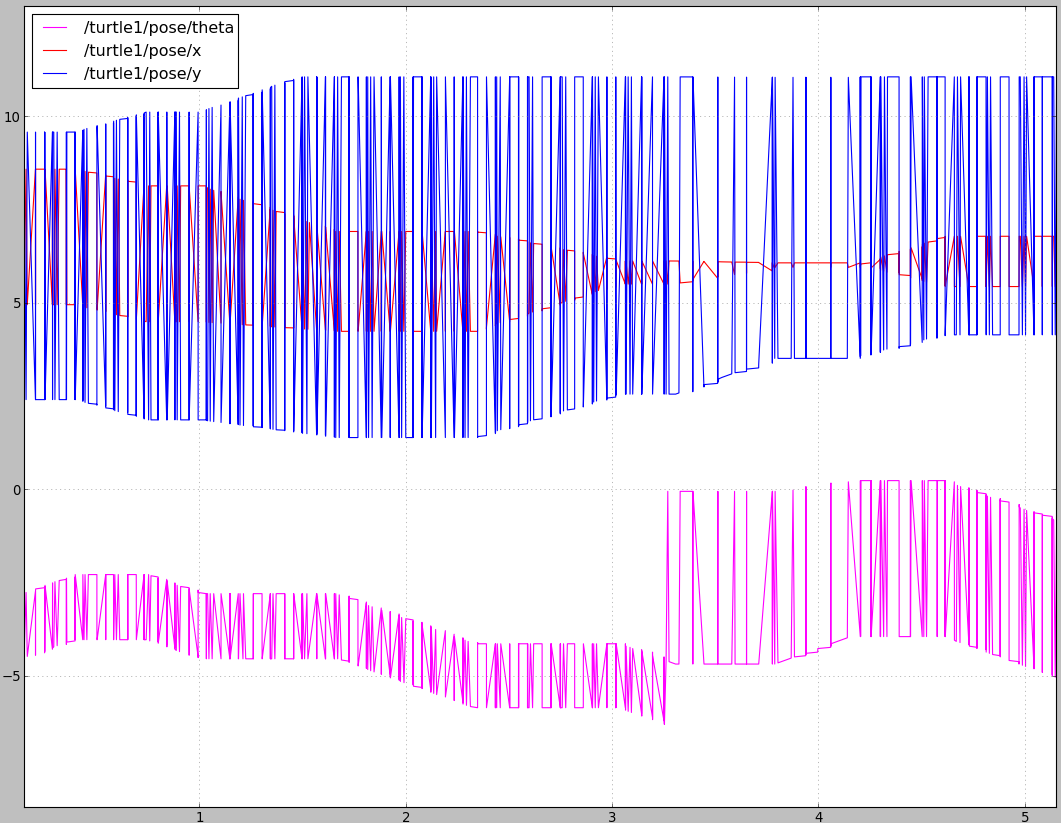
Any idea why it is behaving like that?
Cheers,
Stanislas

Interesting. Is it possible for you to share the `.bag` file with us? If so just put it wherever we can access and tell the URL. Thanks.
Sure, here is the .bag file: https://docs.google.com/file/d/0B-nGSg_lpBmuWnpBU3JZalh2Sm8/edit?usp=sharing Thank you for your answer.