
PointCloud2 orientation Problem? [I need some help!]
Hello All
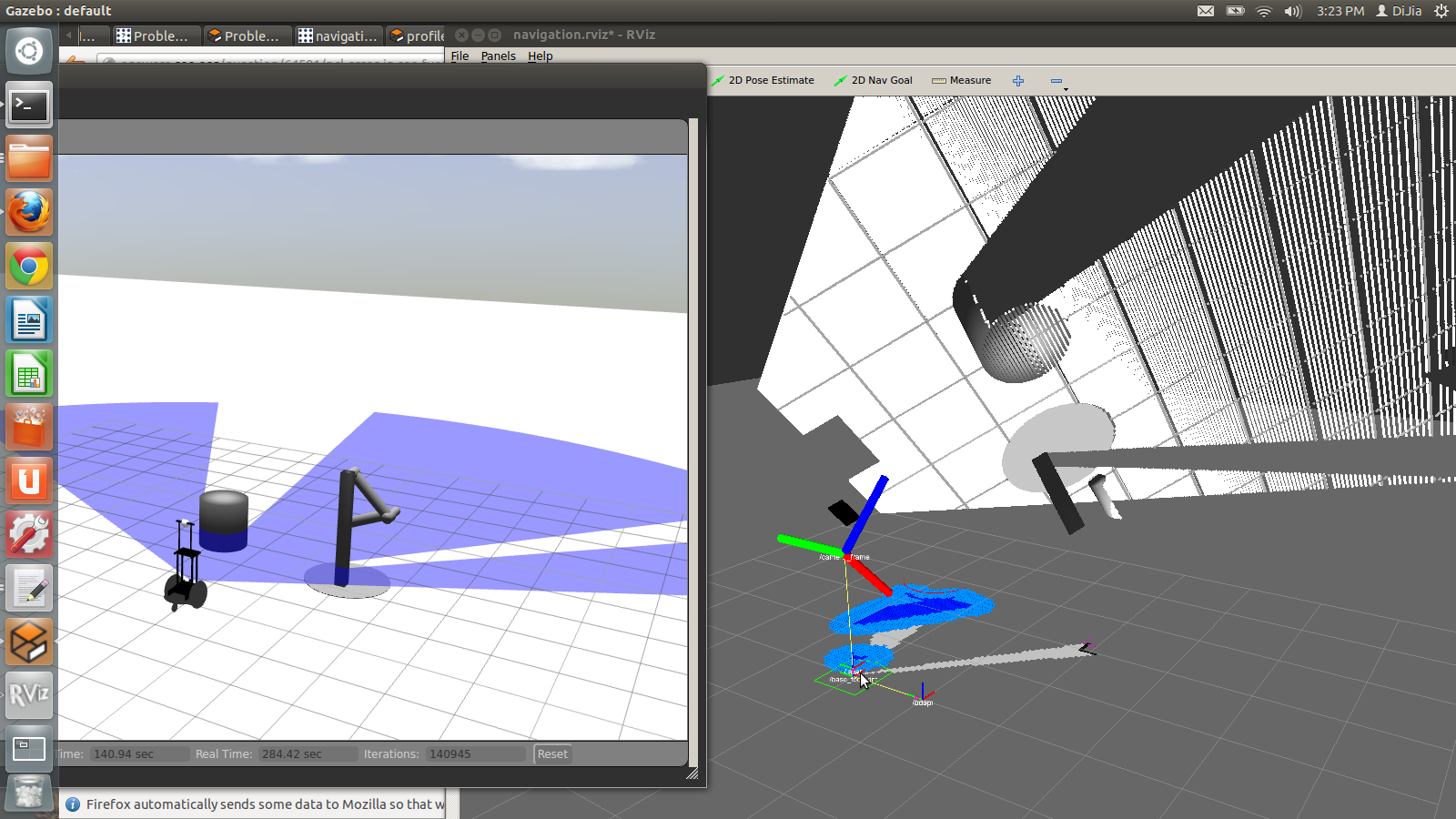
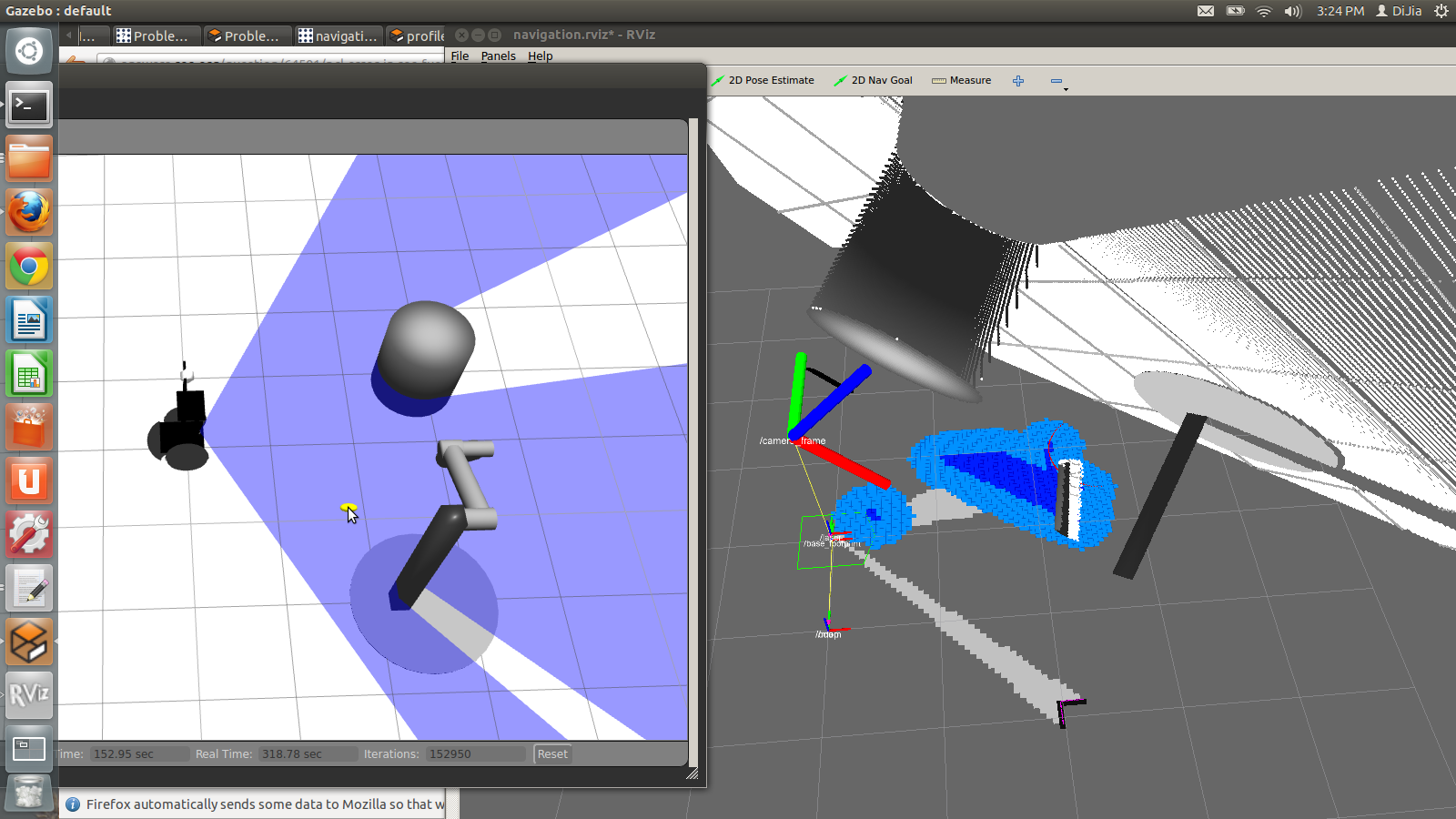
I am having some problems with the orientation of ht PointCloud2 image published. I could tell it's not the problem with the TF because the axis looks correct according to the Rviz. Do you guys know where-else did I forgot to change the orientation? thank you in advance!
The problem is, as you could see from the image below. The TF transform is correct. But then the PointCloud2 looks like it has some "roll yaw pitch" error; the clouds should be on the ground plane; it shouldn't be flying at the mid air.


You didn't say what the problem was...