
How to show point cloud2 on rviz?
I use fuerte.
I write a topic /output_plane,and I also can find it on rostopic.
sam@sam:~/code/ros/sam_pcl/sam_ransac$ rostopic echo /output_plane
header:
seq: 2
stamp:
secs: 1345201963
nsecs: 71831081
frame_id: /base_link
height: 1
width: 274386
fields:
-
name: x
offset: 0
datatype: 7
count: 1
-
name: y
offset: 4
datatype: 7
count: 1
-
name: z
offset: 8
datatype: 7
count: 1
is_bigendian: False
point_step: 16
row_step: 4390176
data: [27, 18, 111, 191, 82, 184, 46, 191, 59, 223, 151, 191, 0, 0, 128, 63, 219, 133, 110, 191, 41, 232, 46, 191, 213, 9, 152, 191, 0, 0, 128, 63, 93, 254, 107, 191, 223, 55, 46, 191, 210, 111, 151, 191, 0, 0, 128, 63, 248, 223, 106, 191, 236, 250, 45, 191, 100, 59, 151, 191, 0, 0, 128, 63, 173, 47, 106, 191, 237, 13, 46, 191, 199,
...
0, 0, 128, 63]
is_dense: True
---
I add point cloud2 and set the topic, but my rviz is still no message comein.
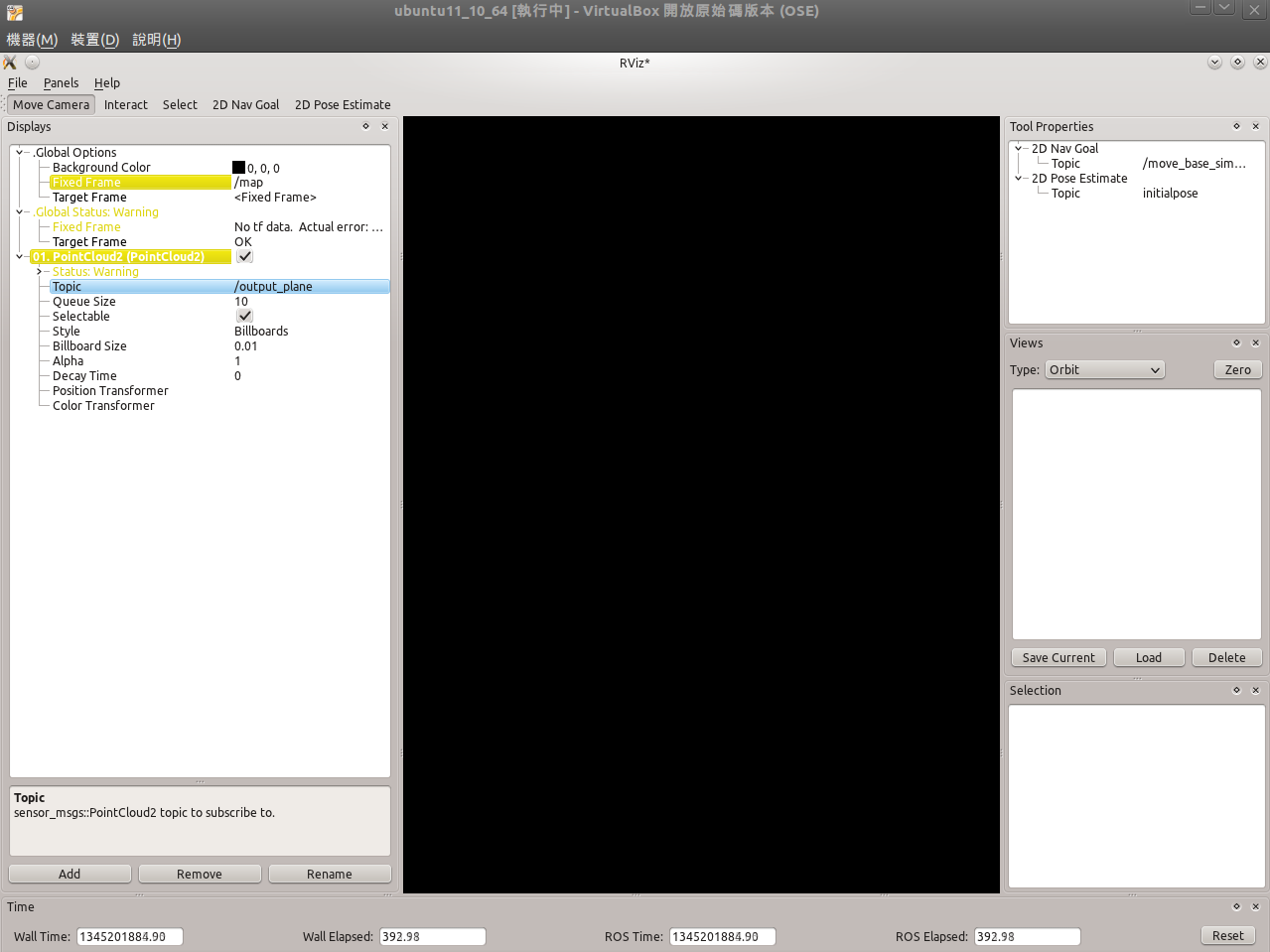
How to fix it?
Thank you~
=================================
Here is all my topics:
sam@sam:~/code/ros/sam_pcl/sam_ransac$ rostopic list
/cloud_pcd
/initialpose
/move_base_simple/goal
/output_plane
/rosout
/rosout_agg
/tf
sam@sam:~/code/ros/sam_pcl/sam_ransac$
And when I close rviz, it becomes:
sam@sam:~/code/ros/sam_pcl/sam_ransac$ rostopic list
/cloud_pcd
/output_plane
/rosout
/rosout_agg
sam@sam:~/code/ros/sam_pcl/sam_ransac$
add a comment

