Control ros1 turtlebot in flatland with ros2 rviz2
Hey ROS Community,
i have the following problem:
I got the flatland repository: https://github.com/avidbots/flatland I also get the turtlebot flatland: https://github.com/avidbots/turtlebot...
I want to test out the nav2 stack in flatland turtlebot. So i started the rosbridge: ros2 run ros1_bridge dynamic_bridge
I also start the turtlebot in flatland in ros1 noetic: roslaunch turtlebot_flatland turtlebot_in_flatland.launch
I started the nav2 stack with this file:
#!/usr/bin/env python3
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
from launch.substitutions import LaunchConfiguration
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
nav2_launch_file_dir = os.path.join(get_package_share_directory('nav2_bringup'), 'launch')
rviz_config_dir = os.path.join(get_package_share_directory('nav2_bringup'),'rviz','nav2_default_view.rviz')
map_dir = LaunchConfiguration('map', default=os.path.expanduser('~/catkin_ws/src/turtlebot_flatland/maps/hospital_section.yaml'))
# map_dir = LaunchConfiguration('map', default=os.path.join(get_package_share_directory('arena-simulation-setup'), 'maps', 'map_empty', 'map.yaml'))
return LaunchDescription([
# Declare Parameters to use at runtime
DeclareLaunchArgument(
'map',
default_value= map_dir,
description='Full path to map file to load'),
# Start Launch Files
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'use_sim_time': use_sim_time}.items(),
),
# Start Nodes
Node(
package='rviz2',
node_executable='rviz2',
node_name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
If i use the 2D Nav Goal button in nav1 stack rviz1 both robot move in rviz1 and rviz2.
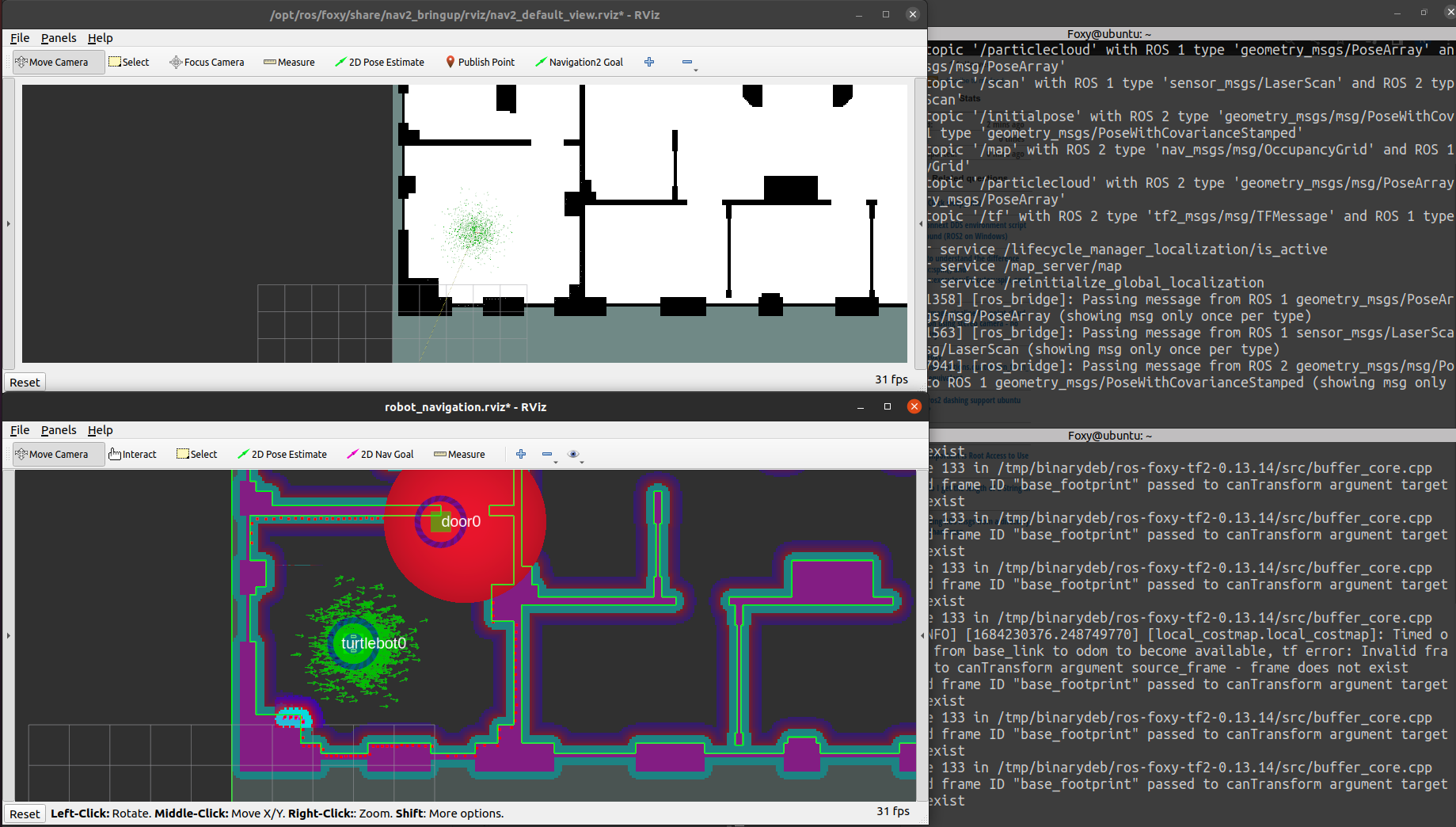
If i use the navigation 2 goal button in rviz2 the robot not moving in rviz1 and rviz2.
I got the following message in the terminal where i started the nav2 stack with rviz2: [amcl-2] Warning: invalid frame ID "base_footprint" passed to canTransform argument target_frame - frame des not exist
How can i use the navigation 2 goal button in rviz2 nav2 stack to control the robot in rviz1 nav1 stack? Is it possible in this way?
Thank you so much !